Procesos de precisión de robot de 6 ejes
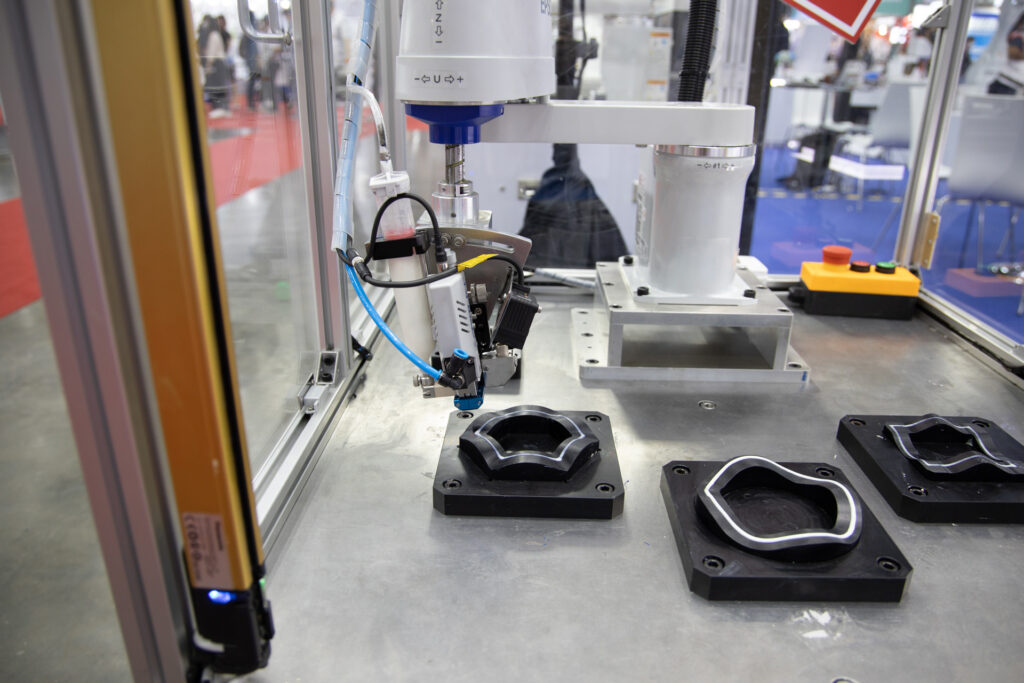
Los procesos de precisión del robot de 5 y 6 ejes se logran mediante los sistemas de control de movimiento Polaris UniverseOne ™. Las aplicaciones van desde corte por láser, soldadura por láser, dispensación de cinta y epoxi, y control del punto central de la herramienta.
El software CAM se puede utilizar para realizar la planificación de la ruta. El archivo de código G resultante se ejecuta utilizando el generador de trayectoria Polaris con líneas, arcos y splines cúbicos PVT. La fusión automática de rutas se produce entre segmentos de ruta. La cinemática inversa y directa mapea los movimientos cartesianos del robot en el movimiento de la articulación del robot. Se admiten muchas configuraciones de máquina, incluidas configuraciones de máquina herramienta CNC de 5 ejes estándar y brazos robóticos articulados.
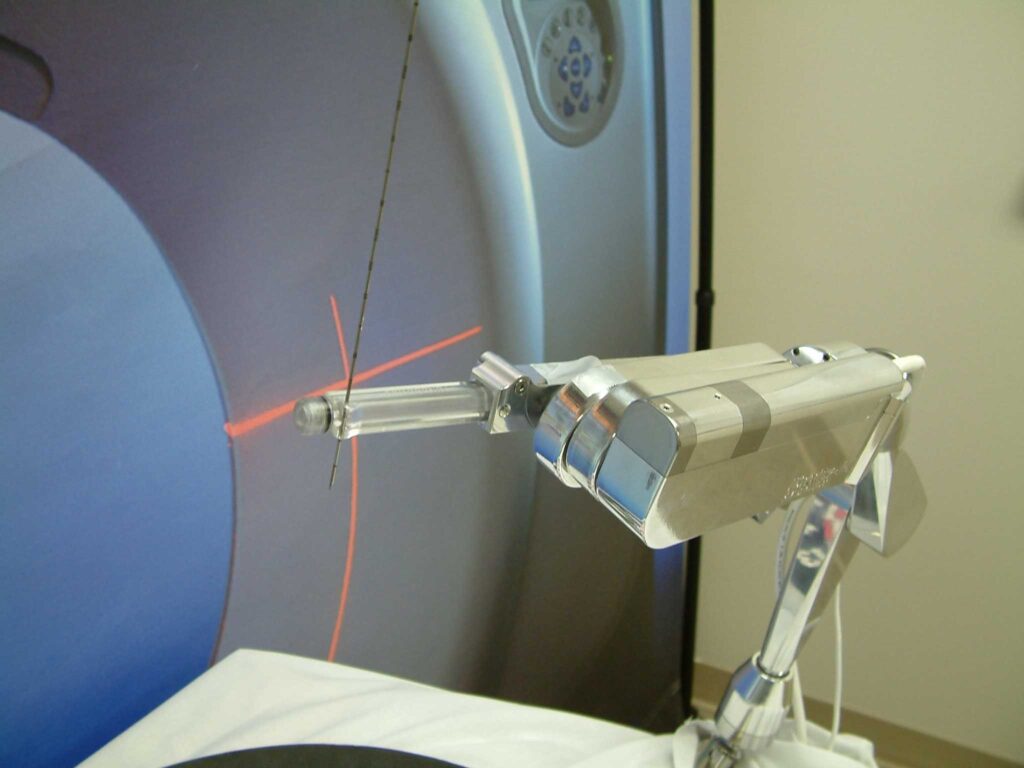
Para muchas aplicaciones, se requiere la coordinación entre la herramienta y el movimiento cartesiano a lo largo de la trayectoria de la herramienta. Para el caso de la soldadura por láser, la entrega de potencia láser a la pieza de trabajo se hace proporcional a la velocidad a lo largo de la trayectoria de la herramienta y se gestionan las rampas ascendentes y descendentes. Para la dispensación de epoxi, la velocidad a lo largo de la ruta de dispensación se mantiene constante mientras que el fluido de dispensación se aplica a una tasa volumétrica constante.
Características típicas
Algunas de las características de Polaris utilizadas en los procesos de robots de precisión incluyen:
- Cinemática inversa del robot
- Control del punto central de la herramienta (TCPC)
- Generación de trayectorias de herramientas con ranuras cúbicas PVT
- Control coordinado de la trayectoria de la herramienta y la potencia de la herramienta o el caudal
- Código G cartesiano
¿Tiene preguntas?
Nos encantaría ayudar. Visite nuestra página de preguntas para enviar su consulta.