Polaris Motion tiene los controladores de movimiento adecuados para su aplicación avanzada.
Desde hardware modular de alto rendimiento hasta software potente que puede simular sus procesos, tenemos las herramientas para sus herramientas.

Red de control de movimiento
Mercury ™ es la red patentada de Polaris Motion, Gbps, precisión ns, en tiempo real optimizada para el control de movimiento. Mercury conecta los controladores de movimiento Polaris con todas las unidades de la red. Los sistemas comunes utilizan entre 2 y 32 unidades, pero más de 100 unidades pueden estar en la red.
>>Más Información

Accionamientos de servomotor
Los accionamientos Polaris entregan potencia controlada a una gran variedad de motores de alto rendimiento. Las potencias van desde menos de cien vatios hasta varios kWatts. Se proporcionan accionamientos monofásicos y trifásicos, lineales y PWM. Los variadores se pueden utilizar para motores BLDC, motores de husillo, bobinas de voz y motores de escáner Galvo.
>>Más Información
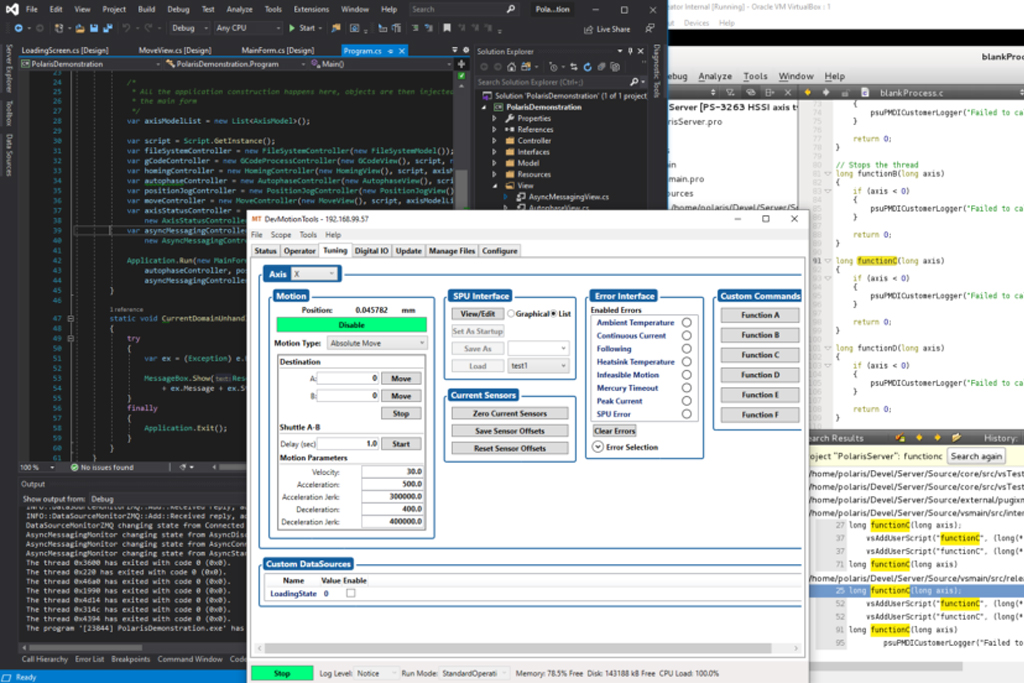
Software de desarrollo de aplicaciones
Los clientes OEM de Polaris utilizan las herramientas de desarrollo de aplicaciones de software de Polaris para crear sus propias aplicaciones HMI personalizadas. Hay herramientas disponibles para desarrollar código integrado personalizado dentro del controlador de movimiento basado en Intel / Linux de Polaris. Las aplicaciones de cliente HMI se desarrollan utilizando las extensas bibliotecas de software de Polaris Motion.
>> Más información

Motor Polaris G-Code
Polaris Motion ha estado desarrollando su tecnología de código G desde 1996. Es un producto confiable y de alto rendimiento. Se admiten todos los fundamentos, así como nuevas extensiones como "Código G cartesiano". Se incluyen hasta nueve ejes de código G (XYZ-ABC-UVW) y los clientes OEM pueden implementar sus propias extensiones de código G.
>> Más información

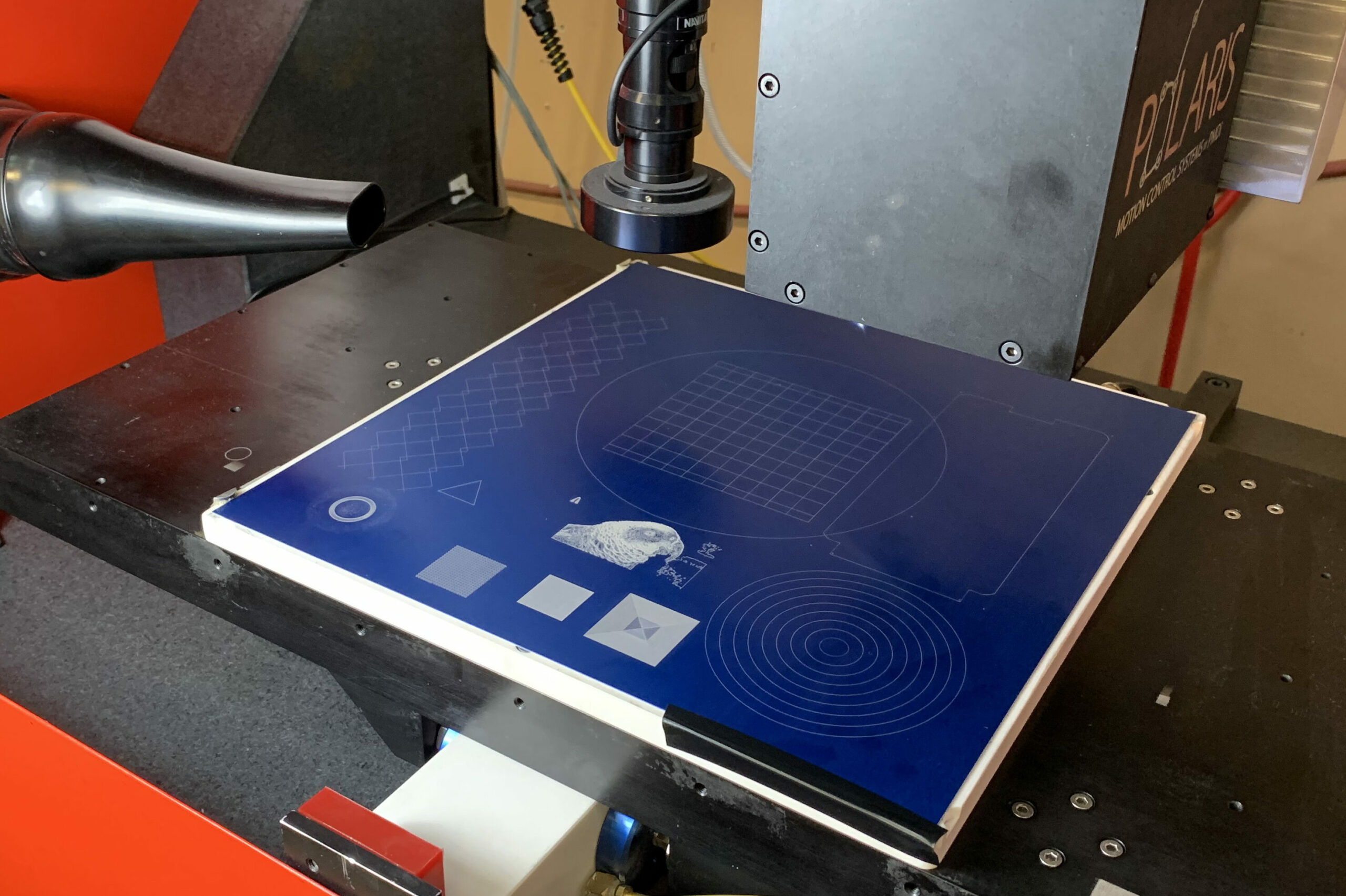
Fabricación láser de precisión
Polaris se especializa en láser y control de movimiento para los exigentes procesos de fabricación basados en láser, incluido el micromecanizado láser, la fabricación aditiva y la estructuración de superficies con láser. Las tecnologías clave incluyen una estrecha sincronización del control láser con la generación de trayectorias de herramientas de varios ejes.
>>Más Información
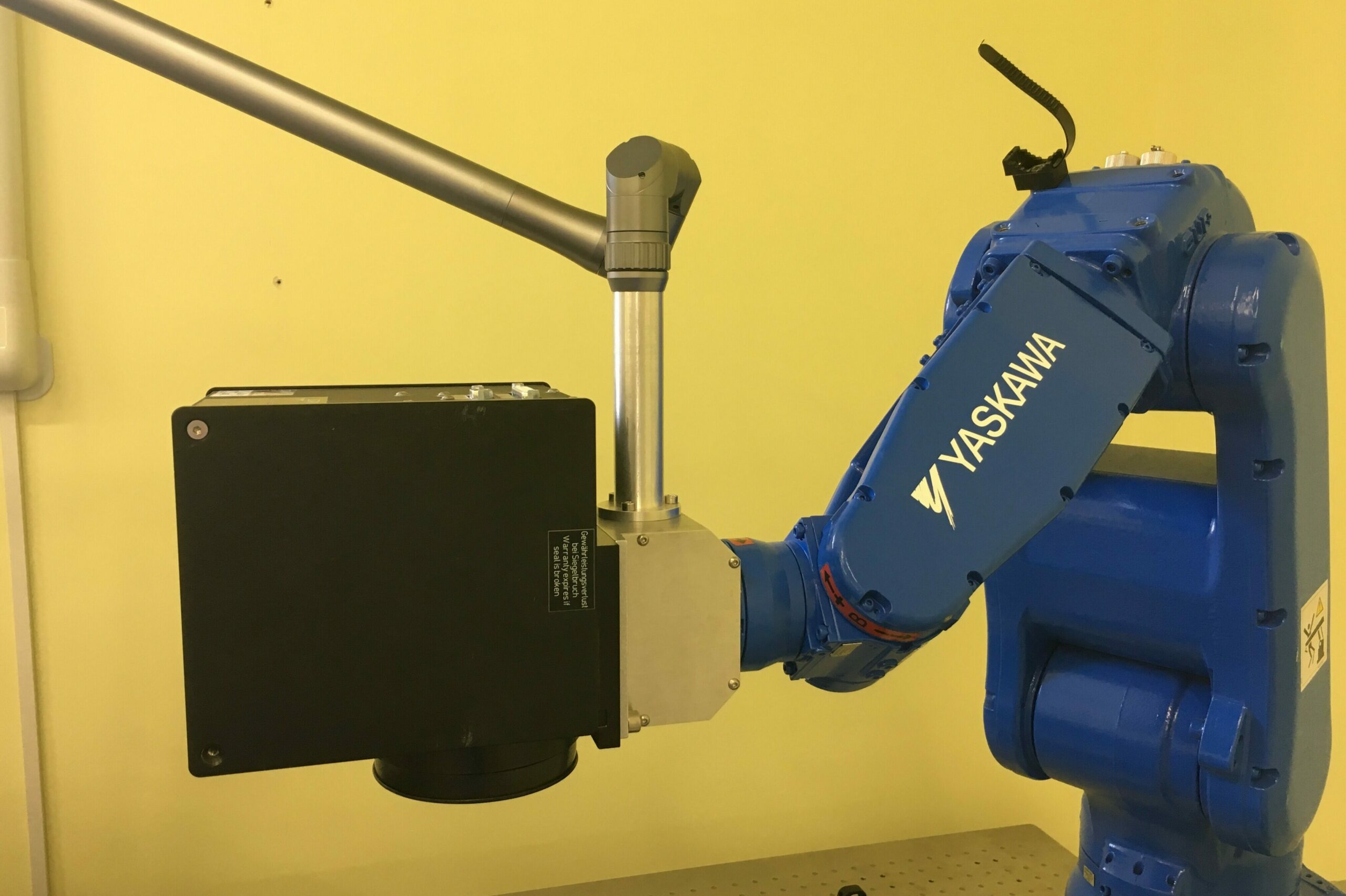
Robots y máquinas multiejes
Polaris Motion utiliza cinemática directa e inversa avanzada para hacer posible el control de máquinas herramienta CNC de ejes múltiples, robots en serie y paralelos. La trayectoria se describe en el sistema de coordenadas cartesianas y los movimientos del actuador se calculan automáticamente.
>> Más información
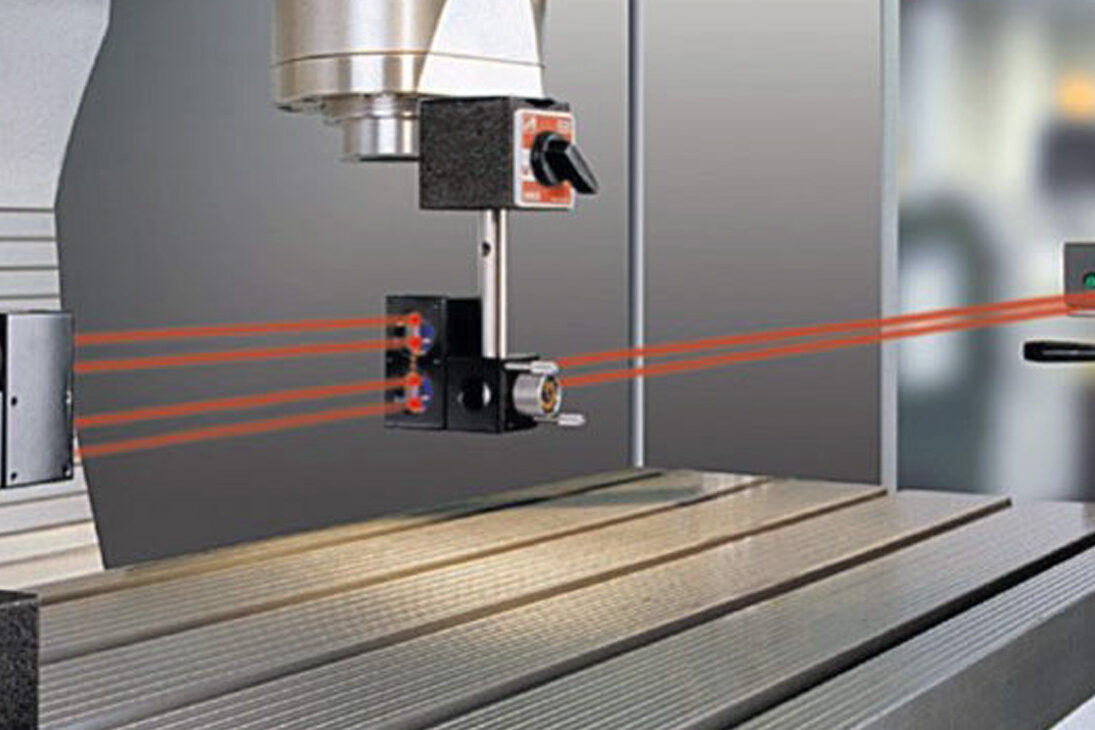
Campo de visión infinito (IFOV)
Un escáner láser Galvo es rápido pero su campo de visión puede ser limitado. Un escenario tiene un área grande pero es lento en comparación con un escáner Galvo. Utilizando el algoritmo IFOV, los movimientos de la etapa y del escáner Galvo se coordinan de manera sofisticada, lo que permite la creación de piezas grandes y detalladas en un tiempo récord. Se eliminan los errores de costura.
>>Más Información
Tecnología de control láser
La tecnología de control láser Polaris se utiliza para controlar láseres de onda continua (CW), así como láseres pulsados de nanosegundos, picosegundos y femtosegundos. Se emplea una amplia variedad de técnicas que incluyen disparo de paso fijo y pulso a pedido (POD) para láseres de pulso y modelado de pulso de láser analógico (ALPS) para láseres de CW.
>> Más información