Red de control de movimiento en tiempo real de alta velocidad Mercury ™
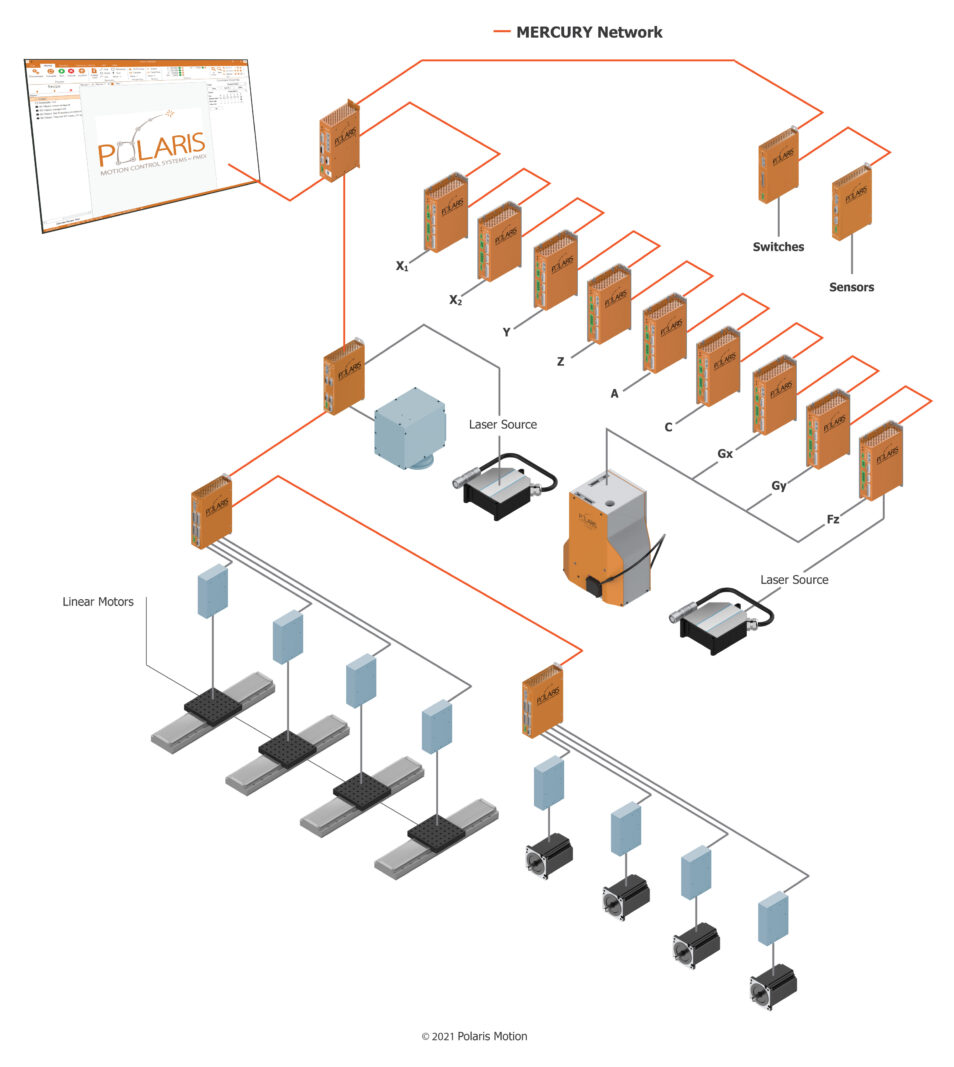
Mercury ™ es la red de control de movimiento de ultra alta velocidad patentada de Polaris Motion. Se usa para conectar un Polaris UniverseOne ™ controlador con unidades, E / S y otros dispositivos. Un controlador tiene 4 puertos, cada uno de los cuales admite una conexión en cadena de hasta 31 dispositivos para un máximo de 124 dispositivos en una red Mercury ™.
Patente de EE.UU. 8,363,680
Patente europea 2494742 B1
Una red Mercury ™
tiene cuatro protocolos:
1. Protocolo sincrónico
2. Protocolo asincrónico
3. Protocolo de transmisión
4. Protocolo de tiempo
Mercurio™ Protocolo de comunicación de red
1.Usando el protocolo sincrónico, los puntos de ajuste de posición se envían desde el controlador a cada uno de los accionamientos remotos con el tic de la señal SYNC. Simultáneamente, los datos se recopilan de las unidades a la misma velocidad, la misma señal SYNC y se envían al controlador para su almacenamiento o análisis. Usando la señal SYNC, se pueden lograr velocidades de punto de ajuste de 1kHz a 200kHz para configuraciones de máquina de múltiples ejes.
2.La protocolo asincrónico utiliza software que se ejecuta en el controlador para solicitar información como la posición actual, la temperatura del variador y otras variables de la máquina de los registros del variador.
3.La protocolo de transmisión se utiliza para programar los variadores, las E / S digitales, las E / S analógicas y los demás dispositivos de red Mercury ™ con nuevo firmware.
4.La protocolo de tiempo es una tecnología sofisticada que garantiza que cada dispositivo de la red Mercury ™ esté sincronizado entre sí en nanosegundos.
dispositivos compatibles
Hay una lista completa de dispositivos que están disponibles para la red de control de movimiento Mercury ™. Éstos incluyen:
- Controlador de movimiento Polaris UniverseOne ™
- Variadores PWM monofásicos y trifásicos
- Variadores lineales monofásicos y trifásicos
- Accionamientos para galvanómetro
- E / S digital
- E / S analógica
- Módulos de interfaz servo para 3rd Sistemas de servomotores para fiestas
- Módulos de interfaz de dirección de paso para 3rd Party sistemas de motor paso a paso
- Módulos de escáner XY2-100 Galvo
- Módulos de escáner SL2-100 Galvo
- Módulos de escáner HSSI Galvo
- Escáneres Polaris 2D y 3D Galvo
- Dispositivos especializados para clientes OEM
Rendimiento
La red de control de movimiento patentada Mercury ™ de Polaris Motion se ha optimizado para aplicaciones de control de movimiento de alto rendimiento. Ha sido diseñado para soportar las arquitecturas de máquinas más exigentes. El protocolo puede admitir la comunicación desde un solo controlador de movimiento a múltiples máquinas o robots CNC. Se puede utilizar para controlar una serie de cabezales de escaneo 3D para aplicaciones de metal AM. Algunas capacidades de la red Mercury ™ incluyen:
- 4 puertos en tiempo real a 1 Gbps por puerto
- Transmisión de datos bidireccional
- 125 dispositivos incluido el controlador
- Comunicación de datos sincrónica
- Comunicación de datos asíncrona
- Protocolo de transmisión para la programación
- Protocolo de tiempo para sincronización