Software de configuración y ajuste MotionTools ™
MotionTools es un cliente de software Polaris Motion que se utiliza para configurar, configurar, ajustar y operar un sistema de control de movimiento Polaris UniverseOne ™.
Un sistema típico de control de movimiento de Polaris tiene un controlador, varios accionamientos de servomotor, un módulo de E / S digital y periféricos que se comunican entre sí a través de la red de control de movimiento de alta velocidad Mercury ™.
MotionTools ™ está organizado en pestañas y menús. Los elementos de la pestaña principal son los siguientes
- Observación del estado de los dispositivos en la red Mercury ™
- Operación de la máquina controlada por el sistema de control de movimiento Polaris
- Sintonización de servomotores
- Observación del estado de las E / S digitales
- Actualización de firmware para dispositivos ubicados en la red Mercury
- Transferencia de archivos entre la PC cliente y el controlador de movimiento Polaris UniverseOne ™
- Configuración de dispositivos ubicados en la red Mercury ™
Estado de observación
Observar el estado de un sistema de control de movimiento Polaris puede resultar muy útil. En la pestaña de estado, se pueden observar muchas cosas, que incluyen: un escaneo de todas las unidades y módulos de E / S en la red Mercury ™, versiones de hardware y firmware, velocidades de servo, modos de disparo láser y muchos otros detalles de hardware y firmware .
Funcionamiento del sistema Polaris Motion
MotionTools proporciona herramientas para operar un sistema configurado. Los ejes de movimiento se pueden habilitar y deshabilitar, los motores trifásicos se pueden conmutar manual y automáticamente. Un eje se puede referenciar y desplazar. Los archivos de código G se pueden cargar y ejecutar. Otras funciones incluyen la implementación de campo de visión infinito (IFOV), compensación de codificador y compensación de lente.
Ajuste de un sistema de movimiento Polaris
El ajuste del servomotor es una función importante de MotionTools. En la pestaña de ajuste, se pueden crear, guardar y aplicar diferentes archivos de ajuste de servo PID. Un eje se puede desplazar hacia adelante y hacia atrás y se pueden aplicar parámetros cinemáticos como la aceleración y el tirón. Se pueden usar muchas funciones de movimiento diferentes para la sintonización, incluidos impulso, paso, aleatorio, sinusoidal barrida, suma de senos y más.
Los clientes pueden elegir entre muchas estructuras de control de retroalimentación diferentes. PIDVAFF es estándar y se admiten el control automático de frecuencia y el control de aprendizaje iterativo. Hay filtros de retroalimentación disponibles para el control del eje del pórtico. Además de estos, los filtros digitales se pueden aplicar como estructuras de control de espacio de estado o bi-quads en cascada.
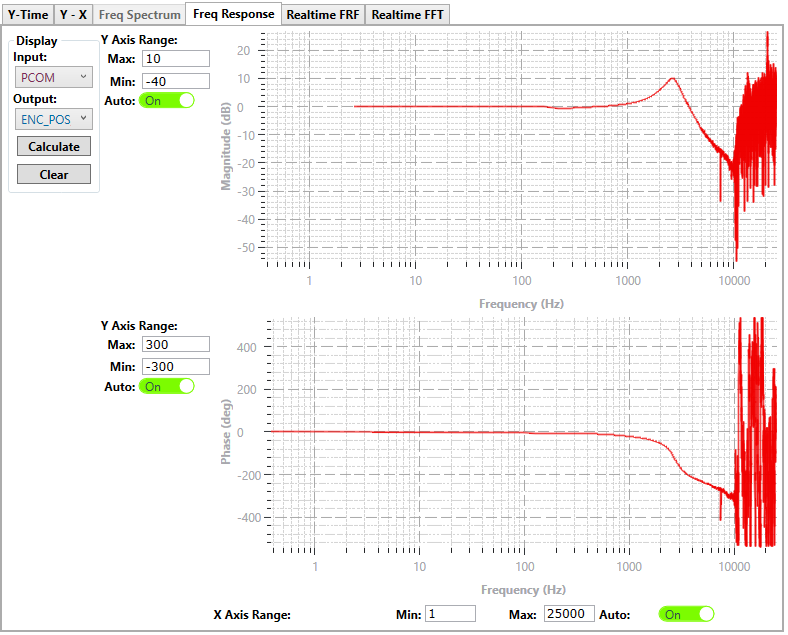
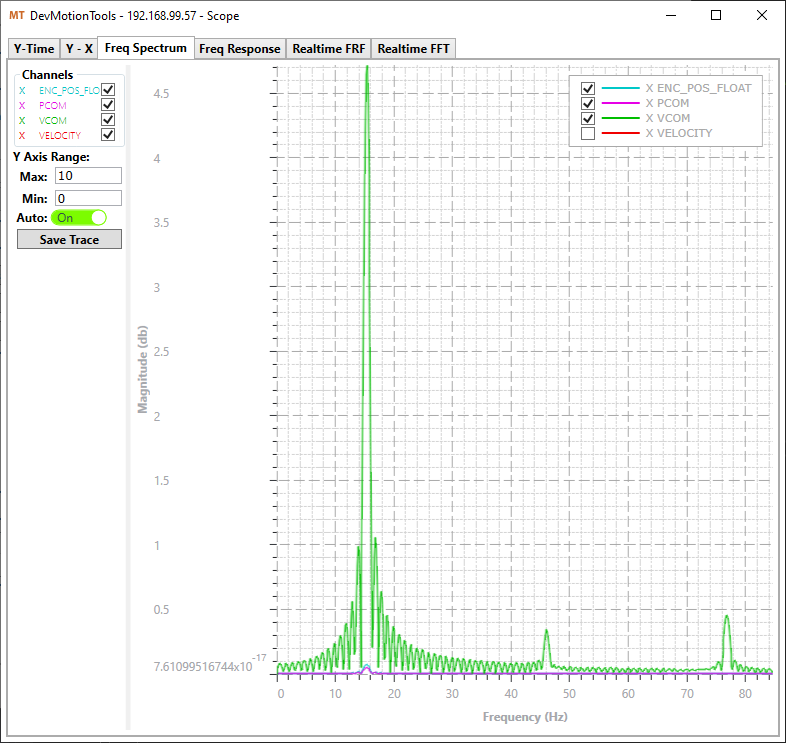
Osciloscopio digital
El osciloscopio digital es una herramienta gráfica de gran capacidad de respuesta y rica en funciones que se puede utilizar junto con la pestaña de ajuste para optimizar el rendimiento del motor. Hay una gran variedad de tipos de gráficos disponibles, que incluyen: YT, YX, espectro de frecuencia, respuesta de frecuencia, FRF en tiempo real y FFT en tiempo real. Cualquier variable que se pueda recopilar se puede trazar y analizar, incluida la posición real, la velocidad, la aceleración, la corriente y el voltaje.
Para facilitar su uso, el osciloscopio tiene rango automático, disparo, zoom, panorámica, cursores y mediciones. También hay captura de alcance para guardar en archivo.
Configuración del sistema y configuración del dispositivo
Otras características notables que ayudan a facilitar el uso de Polaris incluyen: visualización y control de E / S digitales, configuración de parámetros de ejes, administración de archivos de firmware, configuración IFOV, generación de tablas Hall, calibración de lentes y más.