
Software de servidor de control de movimiento
Polaris Server es la aplicación de software de control de movimiento integrado que se ejecuta en Linux en una CPU Intel de cuatro núcleos ubicada dentro de un controlador de movimiento Polaris UniverseOne ™. Polaris Server se comunica con el software del cliente por un lado y con la red de dispositivos Mercury ™ por el otro.
Dentro de Polaris Server hay un motor de movimiento de propósito general, un motor de código G, funcionalidad de adquisición de datos de alta velocidad y muchas otras funciones. Un generador de puntos de ajuste de alto rendimiento maximiza el rendimiento de la máquina mediante el uso de las restricciones de sus ejes.
Interpolación y fusión lineal, circular, spline
Para el movimiento coordinado de varios ejes, el generador de puntos de ajuste realiza una interpolación lineal, circular o spline de acuerdo con la instrucción del programa. La fusión es una técnica que se aplica cuando el ángulo entre los segmentos de la ruta no es cero. El generador de puntos de ajuste Polaris tiene la capacidad de fusionar los siguientes pares de rutas: línea-línea, línea-arco y arco-arco.
Generación de punto de ajuste de tiempo mínimo
Sin igual, el generador de punto de ajuste Polaris UniverseOne ™ utiliza las clasificaciones máximas de cada motor en una máquina para generar la trayectoria de la herramienta. Al acercarse a las curvas, la máquina desacelera lo más rápido que puede y aumenta la velocidad lo más rápido posible a medida que sale de las curvas hacia las rectas. Los límites de velocidad y aceleración de los motores nunca se violan. Los archivos de piezas siempre se completan en el menor tiempo posible.
Generación de punto de ajuste de velocidad constante
Mantener una velocidad constante a lo largo de una trayectoria es importante en muchas aplicaciones, como la soldadura y la dispensación. La velocidad constante más rápida se puede lograr identificando el eje de movimiento más lento y ajustando la velocidad de la trayectoria hasta que se logre una velocidad constante a lo largo de todas las partes de la trayectoria. El Polaris Motion Simulator es útil para realizar este procedimiento.
Movimiento de ejes independientes
En muchas aplicaciones, los ejes de movimiento deben funcionar de forma independiente. Los motores de la máquina deben arrancar y parar en diferentes momentos. Esta funcionalidad está disponible en la API de la biblioteca Motion Control Interface (MCI).
Movimiento de ejes coordinados
El movimiento coordinado es necesario en aplicaciones y procesos en los que todos los motores de la máquina deben arrancar y parar al mismo tiempo. El movimiento se puede especificar en un espacio 2D o 3D. Este tipo de movimiento es común en aplicaciones como soldadura 3D y dispensación donde la herramienta necesita seguir líneas, arcos o estrías con precisión. Los movimientos de movimiento coordinados son compatibles con el código G y la API de la biblioteca MCI.
Control de volante
La función del volante Polaris utiliza una combinación de hardware, firmware y software para permitir que un operador controle un eje de la máquina mediante un generador de pulsos manual. Se utiliza un interruptor mecánico para seleccionar el eje a mover. Los usos típicos incluyen la calibración de la máquina, el avance manual y el cambio de herramientas.
Configuración y control del eje de pórtico
Un eje de pórtico tiene un par de accionamientos y servomotores lineales idénticos. Los servomotores están dispuestos en paralelo y conectados mediante un puente mecánico. Los variadores reciben los mismos puntos de ajuste y el objetivo es que los dos servomotores se muevan de manera idéntica. Esto se logra con un servo regulador de retroalimentación de múltiples entradas y múltiples salidas ejecutado en los variadores Polaris. Los dos ejes comparten información del codificador en tiempo real entre sí a través de la red Mercury ™, se elimina cualquier error de desviación y el pórtico se mueve como una sola unidad. Un pórtico es útil ya que proporciona una posición amplia para la estabilidad mecánica y es capaz de compensar una carga cambiante que se mueve a lo largo del puente.
Generador de puntos de ajuste
El generador de puntos de ajuste Polaris UniverseOne ™ acepta puntos de ruta de la función de código G o de un programa alternativo. La distancia entre los puntos puede ser grande e irregular y es el trabajo del generador de puntos de ajuste llenar los huecos con puntos de ajuste poco espaciados. La tasa de referencia puede ser de 1 kHz, pero puede ser de 20 kHz, 100 kHz o más. La tasa es configurable.

¡Llámanos o haznos una pregunta! ¡Nuestro equipo y yo siempre estamos felices de ayudar!
Tom Erlic, desarrollo empresarial
Lenguaje y motor de código G
>> Más información
Polaris Motion ha estado ofreciendo control avanzado de código G CNC desde 1996, y es una pieza central del sistema de control de movimiento Polaris UniverseOne ™. Nuestra implementación se adhiere al estándar de código G EIA-RS274D y es compatible con máquinas CNC de 3, 5 y 9 ejes. La capacidad central de Polaris G-code proporciona un control de movimiento multieje coordinado y preciso; es una tecnología líder en la industria, y tiene una amplitud y profundidad incomparables al considerar los ejes de movimiento mecánicos y láser-ópticos.
Campo de visión infinito (IFOV)
>> Más información
Los escáneres láser de Galvos son extremadamente rápidos, pero tienen un campo de visión limitado. Por otro lado, las etapas XYZ accionadas por motor BLDC tienen una carrera larga, pero en comparación con los escáneres láser Galvo, son lentas. Al combinar una etapa XYZ de carrera lenta y larga con un escáner rápido láser Galvoscanner de carrera corta, se logra lo mejor de ambos mundos cuando se utiliza la tecnología IFOV de Polaris Motion.
Se emiten comandos lineales, circulares y spline, y la trayectoria se divide en movimiento de escenario y movimiento láser sin problemas.
Control láser
>> Más información
El control láser es necesario para muchos procesos de fabricación, como cortar, taladrar, soldar, grabar, grabar y estructurar superficies. Se necesita un control láser preciso para la fusión en lecho de polvo (PBF) y para la deposición de metal dirigida (DMD). Los láseres se utilizan para procesos de alteración de materiales como el recocido y templado de metales y la modificación de la impedancia en semiconductores.
Para cada uno de estos procesos, existe una técnica preferida para controlar el suministro de energía láser. Las dos amplias clases de láseres son de onda continua (CW) y pulsado. Los láseres CW suelen ser de menor coste y tienen la ventaja de una potencia media alta. Los láseres pulsados tienen una potencia media más baja, pero la energía del fotón de pulso corto rompe los enlaces químicos del material en lugar de quemarse. La zona afectada por el calor (ZAT) se minimiza, los cortes están limpios y el procesamiento posterior del material adicional, como el desbarbado, a menudo es innecesario.
Utilizando hardware y firmware avanzados, los sistemas de control de movimiento Polaris UniverseOne ™ brindan a los clientes la más amplia variedad de técnicas de control de fuente láser para láseres pulsados y láseres CW. La potencia se controla con precisión en tiempo real a medida que el láser recorre la trayectoria de la herramienta. El sobrecalentamiento se convierte en cosa del pasado y se logran resultados de procesamiento de la más alta calidad.
Los variadores Polaris UniverseOne ™, las interfaces SL2-100 y otros módulos vienen equipados con una interfaz de control láser (LCI) para una fácil integración con una amplia variedad de fabricantes de fuentes láser.
Calibración de la máquina
>>Aprender Más
Es necesario un alto grado de precisión para muchas aplicaciones de máquinas herramienta de alta gama. Para algunos equipos se requiere precisión en micrones y para otros, se necesitan precisiones en un solo dígito de nanómetros.
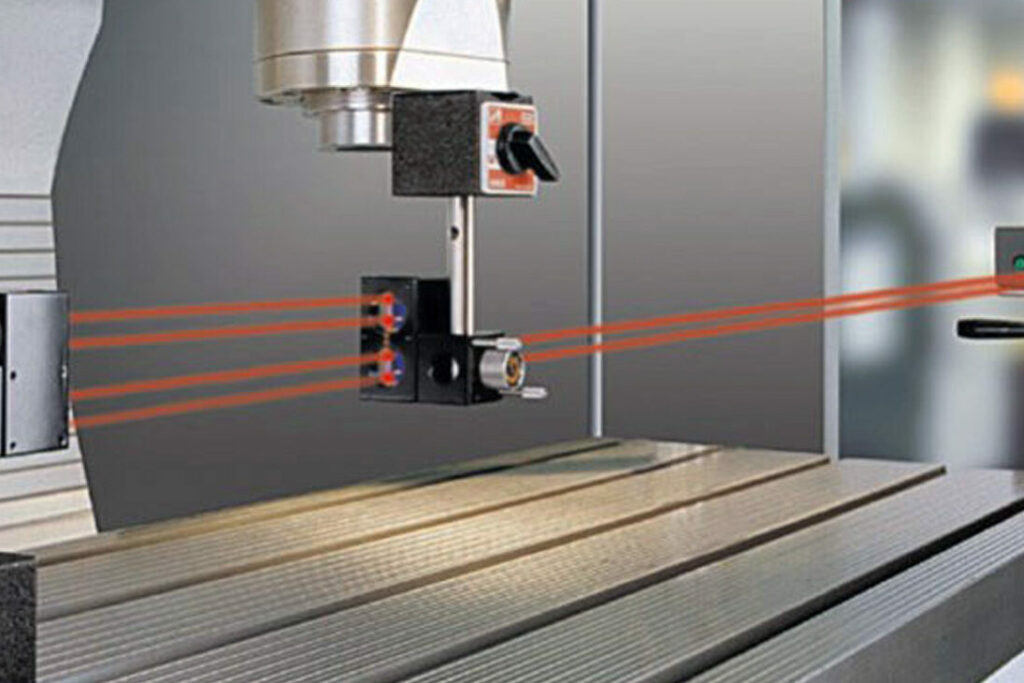
Los sistemas de control de movimiento Polaris UniverseOne ™ vienen equipados con las herramientas que ayudan a lograr estos resultados. Se incluyen técnicas tanto para la calibración de la platina mecánica como para la calibración de la lente óptica. En ambos casos es importante tener una referencia externa precisa, como un interferómetro láser en el caso de la platina mecánica o una placa de calibración de vidrio precisa para el láser Galvoscanner.
Calibración de platina mecánica
>> Más información
Para la calibración de la etapa, Polaris UniverseOne ™ proporciona software de control de movimiento para compensación de retroceso, codificador y error abbe. Se realizan experimentos y se ingresan las mediciones de un interferómetro láser o rastreador junto con los valores del codificador correspondientes. Los algoritmos Polaris UniverseOne ™ proporcionan tablas de calibración que se ejecutan en tiempo real para un funcionamiento preciso de la máquina herramienta.
Calibración del escáner óptico de galvos
>> Más información
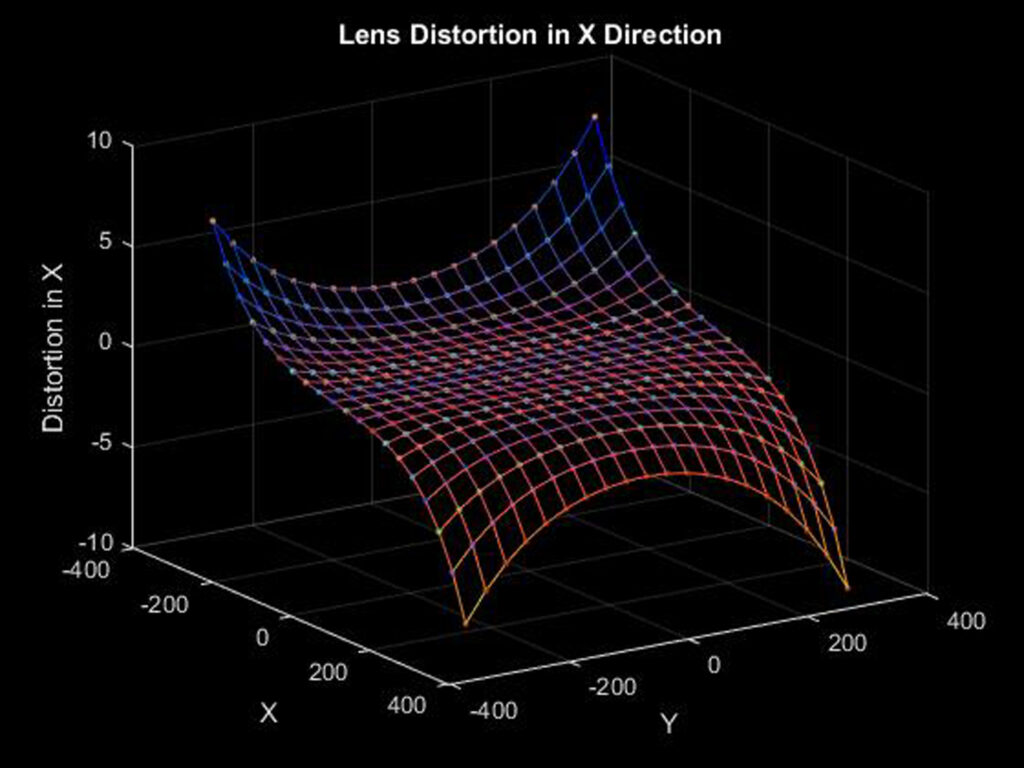
Los sistemas Polaris UniverseOne ™ ofrecen herramientas de calibración para 3rd party XY2-100, SL2-100 y HSSI Galvoscanners y para los nativos Polaris Galvoscanners. Se crea una cuadrícula de fiduciales con el láser Galvoscanner y estos se comparan con los resultados tomados de un sistema de visión artificial. Se ejecuta un algoritmo avanzado de ajuste de curvas para crear una cuadrícula de calibración de alta precisión que produce resultados precisos en tiempo real. La técnica se aplica tanto a los escáneres de Galvos 2D como a los 3D.
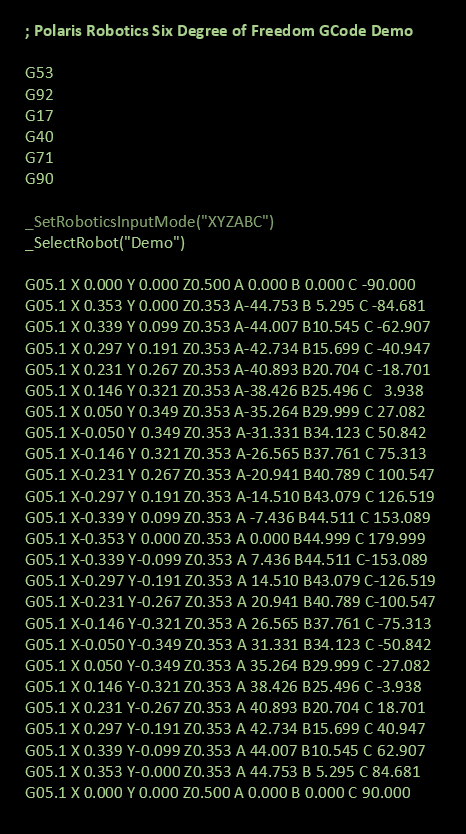
Geometría de máquina herramienta y robot
>> Más información
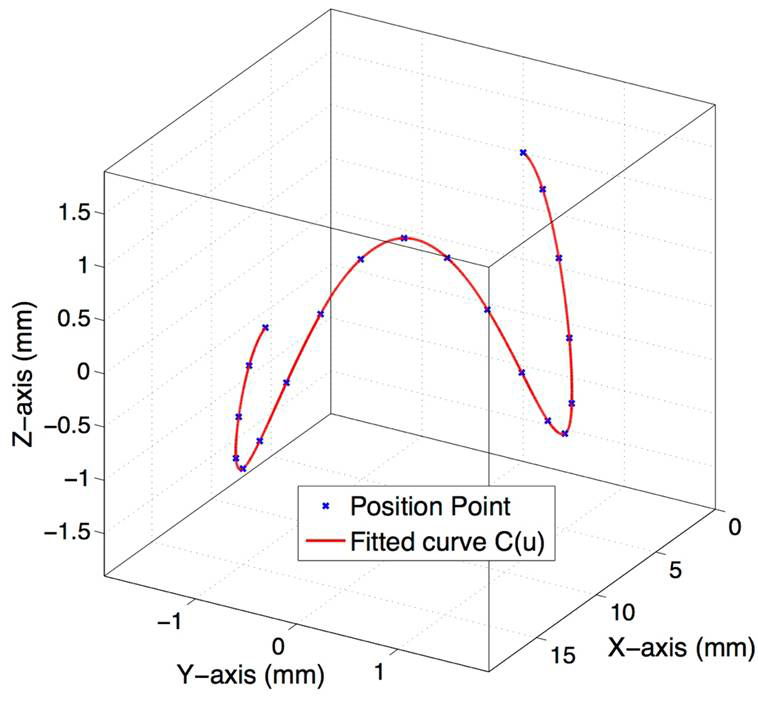
La robótica es compatible con los sistemas de software de control de movimiento Polaris UniverseOne ™ de una manera única y novedosa. Los robots pueden ser manipuladores en serie, en paralelo o híbridos. El mapeo matemático entre la pose del robot, descrita en el sistema de coordenadas cartesianas, y las articulaciones del robot es la cinemática directa e inversa.
Los controladores Polaris UniverseOne ™ encapsulan la cinemática directa, la cinemática inversa y las restricciones en un modelo geométrico o mundial. Esta encapsulación crea una abstracción que permite que la descripción del movimiento ocurra en el espacio cartesiano.
Al realizar este mapeo, se crea una separación entre la robótica, la planificación de rutas y la generación de puntos de ajuste. Se pueden utilizar todas las herramientas estándar, incluidos los paquetes CAM estándar de 5 ejes y el código G de 5 ejes.
Todos los tipos de máquinas pueden ser compatibles de esta manera, incluidas las máquinas herramienta CNC de 5 ejes, los robots industriales en serie, los hexápodos 6DOF precisos y más.
Simulador de sistema de control de movimiento
>> Más información
Polaris UniverseOne ™ Simulator es un programa de software de control de movimiento que simula la generación de trayectorias de herramientas exactamente sin la necesidad de hardware Polaris Motion. El simulador acepta archivos de código G como entrada y genera puntos de ajuste de posición que pueden analizarse.