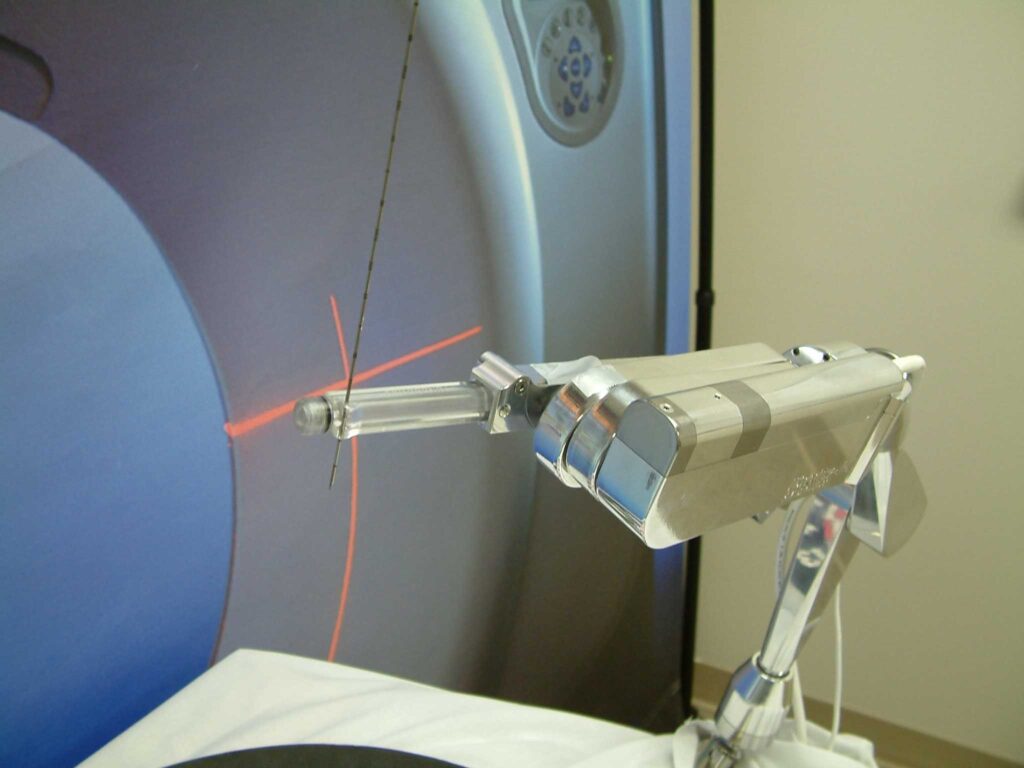
Processus de précision du robot à 6 axes
Les processus de précision des robots à 5 et 6 axes sont réalisés à l'aide des systèmes de commande de mouvement Polaris UniverseOne ™. Les applications vont de la découpe laser, du soudage laser, de la distribution d'époxy et de ruban, et du contrôle du point central de l'outil.
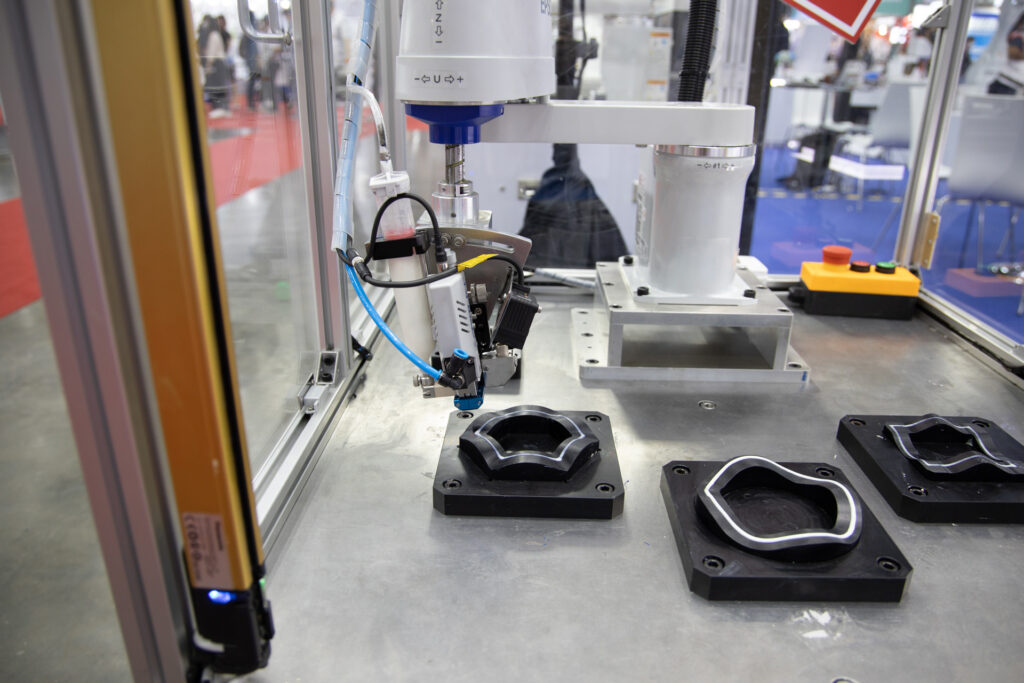
Le logiciel CAM peut être utilisé pour effectuer la planification du chemin. Le fichier de code G résultant est exécuté à l'aide du générateur de trajectoire Polaris avec des lignes, des arcs et des splines cubiques PVT. La fusion automatique des chemins se produit entre les segments de chemin. La cinématique inverse et avant cartographie les mouvements cartésiens du robot en mouvement articulaire du robot. De nombreuses configurations de machine sont prises en charge, y compris les configurations de machine-outil CNC à 5 axes standard et les bras de robot articulés.
Pour de nombreuses applications, une coordination entre l'outil et le mouvement cartésien le long de la trajectoire d'outil est nécessaire. Dans le cas du soudage au laser, la fourniture de puissance laser à la pièce à usiner est rendue proportionnelle à la vitesse le long de la trajectoire de l'outil et la montée et la descente sont gérées. Pour la distribution d'époxy, la vitesse le long du trajet de distribution est rendue constante tandis que le fluide de distribution est appliqué à un débit volumétrique constant.
Caractéristiques typiques
Certaines fonctionnalités de Polaris utilisées dans les processus de robot de précision comprennent:
- Cinématique inverse du robot
- Contrôle du point central de l'outil (TCPC)
- Génération de trajectoires d'outil de spline cubique PVT
- Contrôle coordonné de la trajectoire de l'outil et de la puissance ou du débit de l'outil
- Code G cartésien
Questions?
Nous serions ravis de vous aider. Visitez notre page de questions pour soumettre votre demande.