Logiciel de configuration et de réglage MotionTools ™
MotionTools est un client logiciel Polaris Motion utilisé pour configurer, configurer, régler et utiliser un système de contrôle de mouvement Polaris UniverseOne ™.
Un système de contrôle de mouvement Polaris typique comprend un contrôleur, un certain nombre de servomoteurs, un module d'E / S numériques et des périphériques qui communiquent entre eux via le réseau de contrôle de mouvement à grande vitesse Mercury ™.
MotionTools ™ est organisé en onglets et menus. Les principaux éléments de l'onglet sont les suivants
- Observation de l'état des appareils sur le réseau Mercury ™
- Utilisation de la machine contrôlée par le système de contrôle de mouvement Polaris
- Réglage des servomoteurs
- Observation de l'état des E / S numériques
- Mise à jour du micrologiciel des appareils situés sur le réseau Mercury
- Transfert de fichiers entre le PC client et le contrôleur de mouvement Polaris UniverseOne ™
- Configuration des appareils situés sur le réseau Mercury ™
Statut d'observation
L'observation de l'état d'un système de contrôle de mouvement Polaris peut être très utile. Dans l'onglet d'état, de nombreuses choses peuvent être observées, notamment: une analyse de tous les lecteurs et modules d'E / S sur le réseau Mercury ™, les versions du matériel et du micrologiciel, les taux des servos, les modes de déclenchement laser et de nombreux autres détails sur le matériel et le micrologiciel .
Utilisation du système Polaris Motion
MotionTools fournit des outils pour faire fonctionner un système configuré. Les axes de mouvement peuvent être activés et désactivés, les moteurs triphasés peuvent être commutés manuellement et automatiquement. Un axe peut être référencé et joggé. Les fichiers de code G peuvent être chargés et exécutés. D'autres fonctions incluent la mise en œuvre d'un champ de vision infini (IFOV), la compensation du codeur et la compensation de l'objectif.
Réglage d'un système Polaris Motion
Le réglage des servomoteurs est une fonction importante de MotionTools. Dans l'onglet de réglage, différents fichiers de réglage d'asservissement PID peuvent être créés, enregistrés et appliqués. Un axe peut être commuté d'avant en arrière et des paramètres cinématiques tels que l'accélération et le jerk peuvent être appliqués. De nombreuses fonctions de mouvement différentes peuvent être utilisées pour le réglage, y compris l'impulsion, le pas, l'aléatoire, le sinus balayé, la somme des sinus et plus encore.
Les clients peuvent choisir parmi de nombreuses structures de contrôle de rétroaction. PIDVAFF est standard, et le contrôle automatique de fréquence et le contrôle d'apprentissage itératif sont pris en charge. Des filtres de rétroaction sont disponibles pour le contrôle de l'axe du portique. En plus de ceux-ci, des filtres numériques peuvent être appliqués sous forme de bi-quads en cascade ou de structures de commande d'espace d'états.
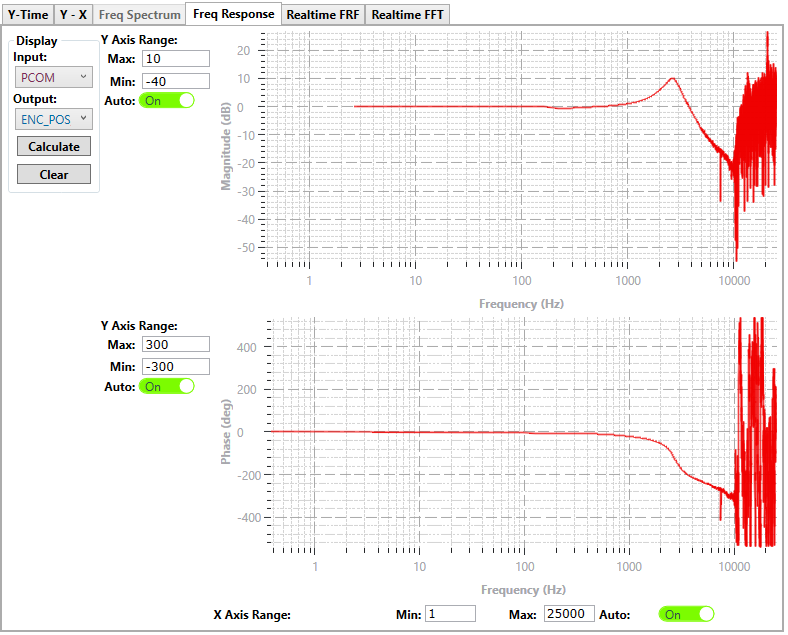
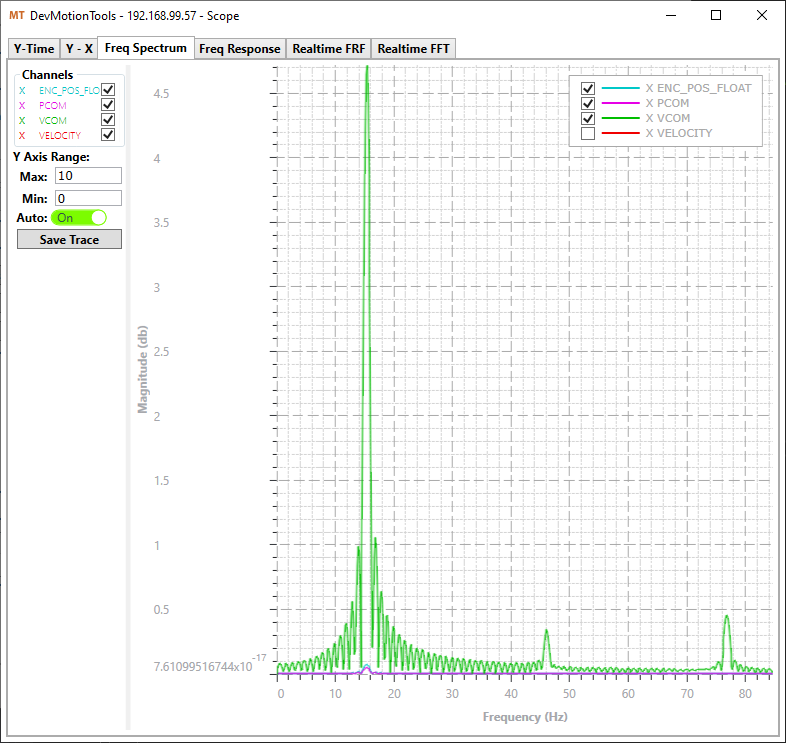
Oscilloscope numérique
L'oscilloscope numérique est un outil graphique très réactif et riche en fonctionnalités qui peut être utilisé en conjonction avec l'onglet de réglage pour optimiser les performances du moteur. Une grande variété de types de tracés est disponible, notamment: YT, YX, spectre de fréquences, réponse en fréquence, FRF en temps réel et FFT en temps réel. Toute variable qui peut être collectée peut être tracée et analysée, y compris la position réelle, la vitesse, l'accélération, le courant et la tension.
Pour une utilisation simple, l'oscilloscope est doté d'une plage automatique, d'un déclenchement, d'un zoom, d'un panoramique, de curseurs et de mesures. Il existe également une capture de portée pour l'enregistrement dans un fichier.
Configuration du système et configuration de l'appareil
D'autres caractéristiques notables qui aident à rendre le Polaris plus facile à utiliser comprennent: l'affichage et le contrôle des E / S numériques, les réglages des paramètres des axes, la gestion des fichiers du micrologiciel, la configuration IFOV, la génération de la table Hall, l'étalonnage de l'objectif et plus encore.