Polarisはあなたが望むすべてのものです:正しく設計された信じられないほど高速なリアルタイム制御。 PMDiは、モーター、I / O、および制御アルゴリズム間で正確なタイミングと調整された操作を必要とするプロジェクトを一般的に取り巻く不安を取り除きました。 さらに、継続的に成長しているAPIの豊富なセットを備えた、プログラマーに優しい最新の開発環境を提供することで、あなたを喜ばせます。 それに加えて、彼らはあなたが親しい友人や同僚と一緒に働いているように感じさせることのないカスタマーサービス体験を提供します。
Nicholas Eastvold、ソフトウェアエンジニアリングマネージャー
アメテック・プレシテック
強力で使いやすいモーションコントロールアプリケーション開発プラットフォーム
Polaris Motionの目標は、高度な機能を維持しながら、使いやすいモーションコントロールアプリケーション開発環境を作成することです。 これを可能にする開発パッケージには、多くのシステムとツールが含まれています。
組み込みアプリケーションの作成
PolarisUniverseOne™モーションコントローラーは、強力なコンピューティングプラットフォームです。 ハードウェアコンピューティングエンジンとしてクアッドコアIntelCPUプロセッサを使用し、オペレーティングシステムとして標準のDebianLinuxを使用します。 モーションネットワークなどのリアルタイムプロセスは、カスタムFPGAハードウェアを使用して管理されます。
クライアントHMIソフトウェアとの通信は通常のイーサネットを介して実行され、ドライブアクチュエータへの通信は、PolarisMotionの特許取得済みのリアルタイムGbpsモーションコントロールネットワークであるMercury™を介して行われます。
Qtクリエーター環境は、組み込みソフトウェアの開発に使用されます。 OEMのお客様は、C ++と、数百の機能にアクセスするためのPolarisMotion通信ライブラリスイートを使用して組み込みコードを記述できます。 Polaris Communication Libraryは、モーションコントロールインターフェイスライブラリ(MCI API)、Gコードインターフェイスライブラリ(GCI API)、Polarisサーバーユーティリティライブラリ(PSU API、高速データ収集ライブラリ(HSDAQ API))のXNUMXつの主要コンポーネントで構成されています。 >>詳細
組み込みアプリケーションは、Polaris Serverで開発、コンパイル、および評価することができます。 別の方法として、プロセス間通信を使用できます。 OEMのお客様は、標準のPolarisServerバイナリと通信する独立した実行可能ファイルを作成できます。
.NET C#およびMFC C ++を使用したHMIの作成
OEMのお客様は、Microsoft Visual Studio開発環境を使用して、独自の工作機械HMIを開発できます。 PolarisUniverseOne™モーションコントローラー内で実行されるPolarisサーバーおよびカスタム実行可能ファイルへの通信は、Polaris通信DLLを使用して行われます。
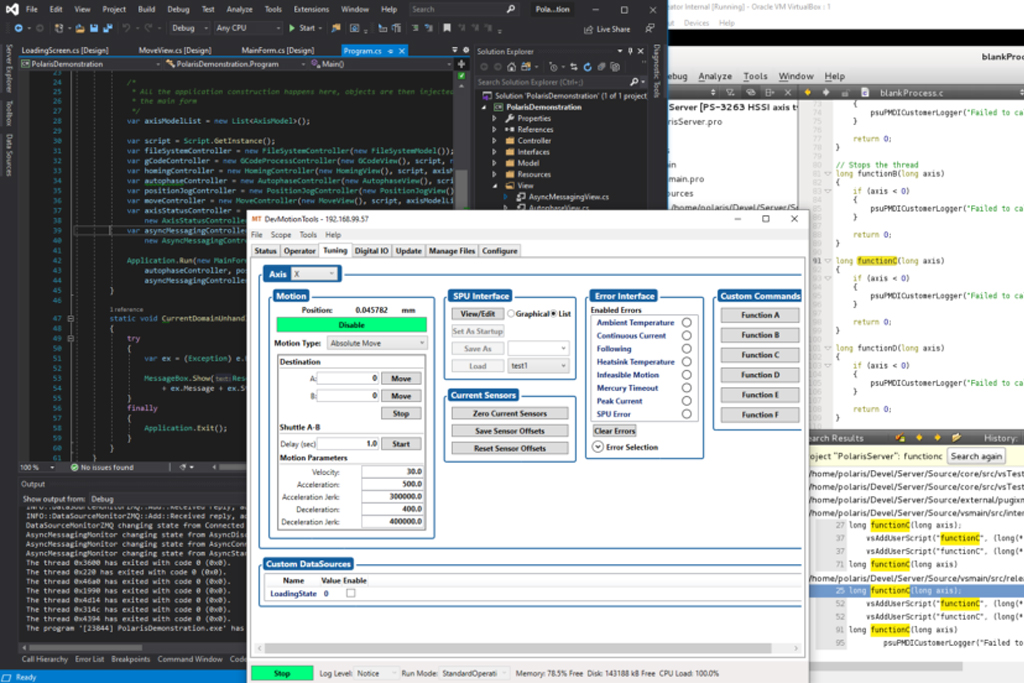
Polarisモーションシミュレーター:MotionSIM2
Polaris MotionSIM2ソフトウェアを使用して、PolarisUniverseOne™モーションコントロールシステムをシミュレートできます。 Polaris MotionSIM2は、Oracle VirtualBoxソフトウェアを使用して、実際のPolarisモーションコントローラーをエミュレートします。 仮想マシンでは、複数の軸を持つ仮想CNCマシンまたは仮想ロボットをセットアップおよび構成することができます。 組み込みプロセスを開発し、シミュレートされたマシンと通信するためにクライアントHMIを開発できます。
実際のハードウェアは必要ないため、複数のソフトウェア開発者が同じプロジェクトで作業して、市場投入までの時間を短縮できます。 アクチュエータの選択を含むさまざまな工作機械オプションは、高価なコンポーネントを購入する前にソフトウェアでテストできます。 商品化の際、セールスエンジニアはシミュレーターを使用して見込み客にデモンストレーションを行うことができ、機械が納品される前であっても、顧客のオペレーターは機械を使用するようにトレーニングできます。