Polaris는 여러분이 원할 모든 것입니다. 믿을 수 없을만큼 빠른 실시간 제어가 올바르게 설계되었습니다. PMDi는 모터, I / O 및 제어 알고리즘간에 정확한 시간과 조정 된 작업이 필요한 프로젝트를 둘러싸고있는 일반적으로 불안감을 제거했습니다. 또한 지속적으로 성장하는 풍부한 API 세트와 함께 현대적이고 프로그래머 친화적 인 개발 환경을 제공하여 사용자를 기쁘게합니다. 무엇보다도 가까운 친구 나 동료와 함께 일하는 것처럼 느끼게하는 고객 서비스 경험을 제공합니다.
Nicholas Eastvold, 소프트웨어 엔지니어링 관리자
아메텍 프레시텍
강력하고 사용하기 쉬운 모션 제어 애플리케이션 개발 플랫폼
사용하기 쉬운 모션 제어 애플리케이션 개발 환경을 만드는 동시에 고급 기능을 보존하는 것이 Polaris Motion의 목표였습니다. 많은 시스템과 도구가이를 가능하게하는 개발 패키지의 일부입니다.
임베디드 애플리케이션 생성
Polaris UniverseOne ™ 모션 컨트롤러는 강력한 컴퓨팅 플랫폼입니다. 하드웨어 컴퓨팅 엔진으로 쿼드 코어 Intel CPU 프로세서를 사용하고 운영 체제로 표준 Debian Linux를 사용합니다. 모션 네트워크와 같은 실시간 프로세스는 맞춤형 FPGA 하드웨어를 사용하여 관리됩니다.
클라이언트 HMI 소프트웨어와의 통신은 일반 이더넷을 통해 수행되고 드라이브 액추에이터에 대한 통신은 Polaris Motion의 특허받은 실시간 Gbps 모션 제어 네트워크 인 Mercury ™를 통해 수행됩니다.
Qt 생성기 환경은 임베디드 소프트웨어 개발에 사용됩니다. OEM 고객은 수백 가지 기능에 액세스 할 수있는 Polaris Motion 통신 라이브러리 제품군과 함께 C ++를 사용하여 임베디드 코드를 작성할 수 있습니다. Polaris 통신 라이브러리는 모션 제어 인터페이스 라이브러리 (MCI API), G- 코드 인터페이스 라이브러리 (GCI API), Polaris 서버 유틸리티 라이브러리 (PSU API, 고속 데이터 수집 라이브러리 (HSDAQ API))의 네 가지 주요 구성 요소로 구성됩니다. >> 더 알아보기
임베디드 애플리케이션을 개발, 컴파일 및 Polaris Server에 좋아요 표시 할 수 있습니다. 대안으로 프로세스 간 통신을 사용할 수 있습니다. OEM 고객은 스톡 Polaris Server 바이너리와 통신하는 독립적 인 실행 파일을 작성할 수 있습니다.
.NET C # 및 MFC C ++로 HMI 생성
OEM 고객은 Microsoft Visual Studio 개발 환경을 사용하여 자신의 공작 기계 HMI를 개발할 수 있습니다. Polaris 서버 및 Polaris UniverseOne ™ 모션 컨트롤러 내에서 실행되는 사용자 지정 실행 파일과의 통신은 Polaris Communication DLL을 사용하여 수행됩니다.
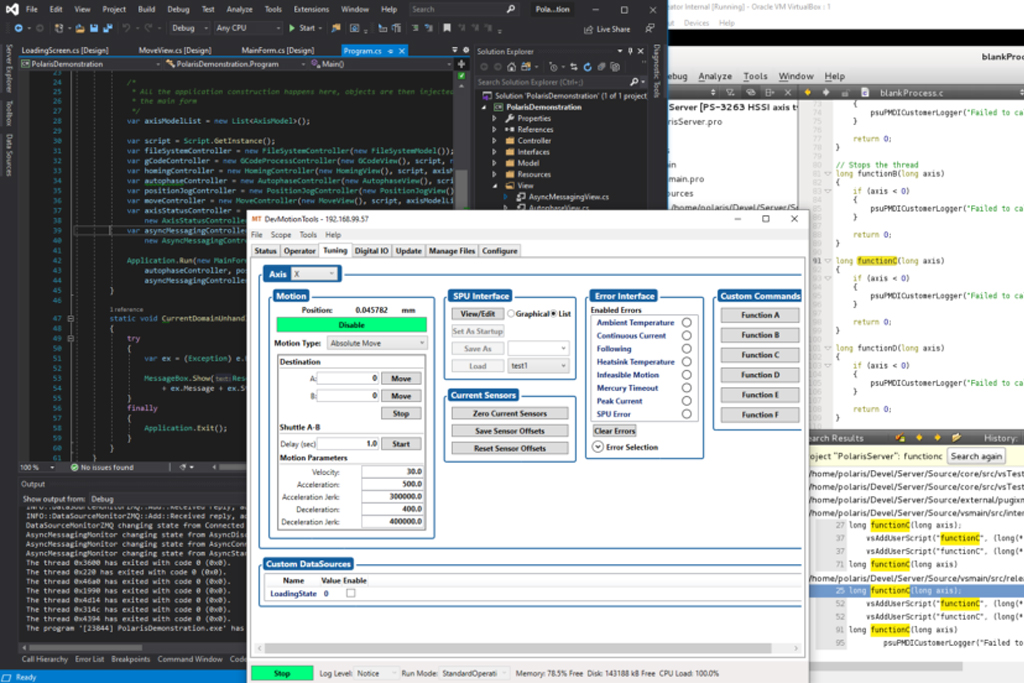
Polaris Motion Simulator : MotionSIM2
Polaris MotionSIM2 소프트웨어를 사용하여 Polaris UniverseOne ™ 모션 제어 시스템을 시뮬레이션 할 수 있습니다. Polaris MotionSIM2는 Oracle VirtualBox 소프트웨어를 사용하여 실제 Polaris 모션 컨트롤러를 에뮬레이션합니다. 가상 머신에서 가상 CNC 머신 또는 여러 축을 가진 가상 로봇을 설정하고 구성 할 수 있습니다. 임베디드 프로세스를 개발하고 클라이언트 HMI를 개발하여 시뮬레이션 된 기계와 통신 할 수 있습니다.
실제 하드웨어가 필요하지 않기 때문에 여러 소프트웨어 개발자가 동일한 프로젝트에서 작업하여 시장 출시 시간을 단축 할 수 있습니다. 액추에이터 선택을 포함한 다양한 공작 기계 옵션은 값 비싼 부품을 구매하기 전에 소프트웨어에서 테스트 할 수 있습니다. 상용화 과정에서 영업 엔지니어는 시뮬레이터를 사용하여 잠재 고객에게 시연 할 수 있으며, 기계가 인도되기 전에도 고객 운영자는 기계 사용 교육을받을 수 있습니다.