Mercury ™ 고속 실시간 모션 제어 네트워크
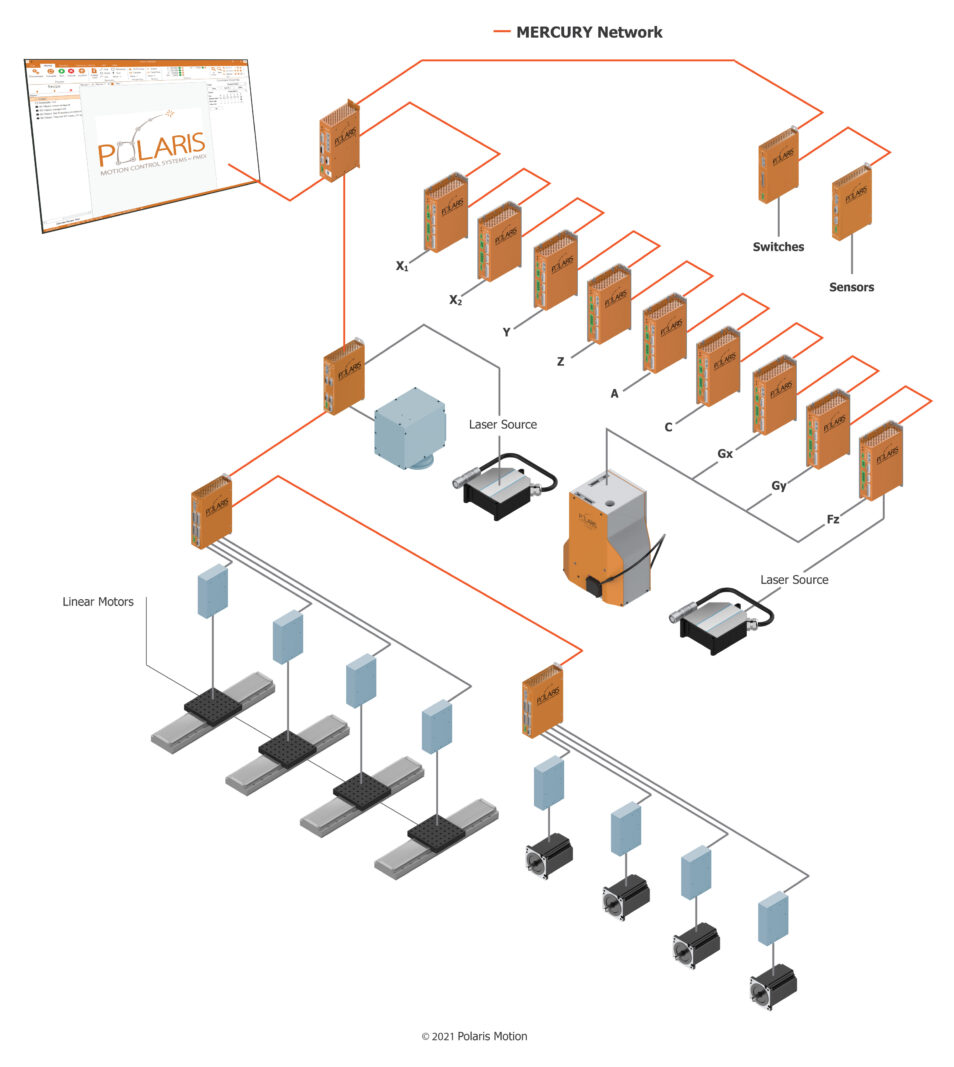
Mercury ™ Polaris Motion의 특허받은 초고속 모션 제어 네트워크입니다. 연결하는 데 사용됩니다. Polaris UniverseOne ™ 드라이브, I / O 및 기타 장치가있는 컨트롤러. 컨트롤러에는 4 개의 포트가 있으며 각 포트는 Mercury ™ 네트워크에서 최대 31 개의 장치에 대해 최대 124 개의 장치의 데이지 체인을 지원합니다.
미국 특허 8,363,680
유럽 특허 2494742 B1
Mercury ™ 네트워크
네 가지 프로토콜이 있습니다.
1. 동기 프로토콜
2. 비동기 프로토콜
3. 스트리밍 프로토콜
4. 시간 프로토콜
수성™ 네트워크 통신 프로토콜
1.사용법 - 동기 프로토콜, 위치 설정 값은 SYNC 신호의 틱에 컨트롤러에서 각 원격 드라이브로 전송됩니다. 동시에 데이터는 동일한 속도, 동일한 SYNC 신호로 드라이브에서 수집되어 저장 또는 분석을 위해 컨트롤러로 다시 전송됩니다. SYNC 신호를 사용하면 다축 기계 구성에 대해 1kHz에서 200kHz까지의 설정 값 속도를 얻을 수 있습니다.
2. 비동기 프로토콜 컨트롤러에서 실행되는 소프트웨어를 사용하여 드라이브 레지스터에서 현재 위치, 드라이브 온도 및 기타 기계 변수와 같은 정보를 요청합니다.
3. 스트리밍 프로토콜 새 펌웨어로 드라이브, 디지털 I / O, 아날로그 I / O 및 기타 Mercury ™ 네트워크 장치를 프로그래밍하는 데 사용됩니다.
4. 시간 프로토콜 Mercury ™ 네트워크의 각 장치가 나노초 이내에 서로 동기화되도록하는 정교한 기술입니다.
지원되는 장치
Mercury ™ 모션 제어 네트워크에 사용할 수있는 포괄적 인 장치 목록이 있습니다. 여기에는 다음이 포함됩니다.
- Polaris UniverseOne ™ 모션 컨트롤러
- 단상 및 XNUMX 상 PWM 드라이브
- 단상 및 XNUMX 상 선형 드라이브
- 검류계 드라이브
- 디지털 I / O
- 아날로그 I / O
- 3 용 서보 인터페이스 모듈rd 파티 서보 모터 시스템
- 3 개용 스텝 방향 인터페이스 모듈rd 파티 스테퍼 모터 시스템
- XY2-100 Galvo 스캐너 모듈
- SL2-100 Galvo 스캐너 모듈
- HSSI Galvo 스캐너 모듈
- Polaris 2D 및 3D Galvo 스캐너
- OEM 고객을위한 특수 장치
퍼포먼스
Polaris Motion의 특허받은 Mercury ™ 모션 제어 네트워크는 고성능 모션 제어 애플리케이션에 최적화되었습니다. 가장 까다로운 기계 아키텍처를 지원하도록 설계되었습니다. 이 프로토콜은 단일 모션 컨트롤러에서 여러 CNC 기계 또는 로봇으로의 통신을 지원할 수 있습니다. 금속 AM 애플리케이션을위한 3D 스캔 헤드 어레이를 제어하는 데 사용할 수 있습니다. 일부 Mercury ™ 네트워크 기능은 다음과 같습니다.
- 포트 당 4Gbps의 실시간 포트 1 개
- 양방향 데이터 전송
- 컨트롤러를 포함한 125 개의 장치
- 동기식 데이터 통신
- 비동기 데이터 통신
- 프로그래밍을위한 스트리밍 프로토콜
- 동기화를위한 시간 프로토콜