
Software de servidor de controle de movimento
Polaris Server é o aplicativo de software de controle de movimento embarcado que é executado no Linux em uma CPU Intel quad core localizada dentro de um controlador de movimento Polaris UniverseOne ™. O Polaris Server se comunica com o software cliente de um lado e com a rede Mercury ™ de dispositivos do outro lado.
Dentro do Polaris Server há um mecanismo de movimento de uso geral, um mecanismo de código G, funcionalidade de aquisição de dados em alta velocidade e muitas outras funções. Um gerador de setpoint de alto desempenho maximiza o rendimento da máquina usando suas restrições de eixos.
Linear, Circular, Interpolação Spline e Mesclagem
Para movimento coordenado de vários eixos, o gerador de setpoint realiza interpolação linear, circular ou spline de acordo com a instrução do programa. Mesclar é uma técnica aplicada quando o ângulo entre os segmentos do caminho é diferente de zero. O gerador de ponto de ajuste Polaris tem a capacidade de mesclar os seguintes pares de caminhos: linha-linha, linha-arco e arco-arco.
Geração de ponto de ajuste de tempo mínimo
Inigualável por qualquer um, o gerador de ponto de ajuste Polaris UniverseOne ™ usa as classificações máximas de cada motor em uma máquina para gerar o caminho da ferramenta. Ao se aproximar das curvas, a máquina desacelera o mais rápido que pode e aumenta a velocidade o mais rápido possível ao sair das curvas para as retas. A velocidade dos motores e os limites de aceleração nunca são violados. Os arquivos de peça sempre são concluídos no mínimo de tempo possível.
Geração de ponto de ajuste de velocidade constante
Manter a velocidade constante ao longo de um caminho da ferramenta é importante em muitas aplicações, como soldagem e distribuição. A velocidade constante mais rápida pode ser alcançada identificando o eixo de movimento mais lento e ajustando a velocidade do caminho da ferramenta até que uma velocidade constante seja alcançada ao longo de todas as partes do caminho. O Polaris Motion Simulator é útil para realizar este procedimento.
Movimento de eixos independentes
Em muitas aplicações, os eixos de movimento precisam ser executados de forma independente. Os motores da máquina precisam iniciar e parar em momentos diferentes. Essa funcionalidade está disponível na API da biblioteca Motion Control Interface (MCI).
Movimento dos eixos coordenados
O movimento coordenado é necessário em aplicações e processos onde todos os motores da máquina precisam iniciar e parar ao mesmo tempo. O movimento pode ser especificado no espaço 2D ou 3D. Esse tipo de movimento é comum em aplicações como soldagem 3D e dispensação, onde a ferramenta precisa seguir linhas, arcos ou ranhuras com precisão. Movimentos de movimento coordenado são suportados usando a biblioteca MCI API e código G.
Controle de volante
O recurso de volante Polaris usa uma combinação de hardware, firmware e software para permitir que um operador controle o eixo de uma máquina usando um gerador de pulso manual. Usamos uma chave mecânica para selecionar o eixo a ser movido. Os usos típicos incluem calibração de máquina, jogging manual e troca de ferramentas.
Configuração e controle do eixo Gantry
Um eixo gantry tem um par de servomotores lineares e drives idênticos. Os servomotores são dispostos em paralelo e conectados por uma ponte mecânica. Os drives recebem os mesmos setpoints e o objetivo é que os dois servomotores se movam de forma idêntica. Isso é realizado com um servo regulador de realimentação de múltiplas entradas e múltiplas saídas executado nos inversores Polaris. Os dois eixos compartilham informações do codificador em tempo real através da rede Mercury ™, qualquer erro de inclinação é eliminado e o gantry se move como uma única unidade. Um pórtico é útil, pois fornece uma ampla base para estabilidade mecânica e é capaz de compensar uma mudança de carga que se move ao longo da ponte.
Gerador de Setpoint
O gerador de ponto de ajuste Polaris UniverseOne ™ aceita pontos de caminho da função de código G ou de um programa alternativo. A distância entre os pontos pode ser grande e irregular e é função do gerador de pontos de ajuste preencher as lacunas com pontos de ajuste bem espaçados. A taxa do ponto de ajuste pode ser 1kHz, mas pode ser 20kHz, 100kHz ou mais. A taxa é configurável.

Ligue para nós ou faça uma pergunta! Eu e nossa equipe estamos sempre dispostos a ajudar!
Tom Erlic, Desenvolvimento de Negócios
Linguagem e mecanismo do código G
>> Saiba Mais
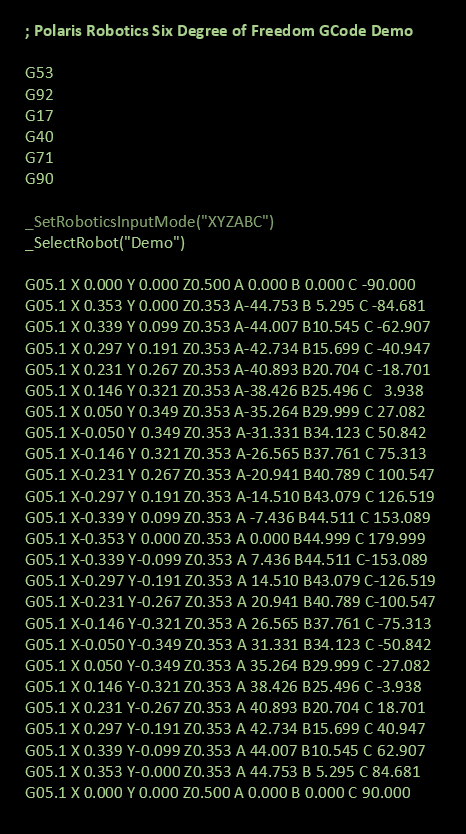
Polaris Motion oferece controle avançado de código G CNC desde 1996 e é uma peça central do sistema de controle de movimento Polaris UniverseOne ™. Nossa implementação segue o padrão de código G EIA-RS274D e suporta máquinas CNC de 3 eixos, 5 eixos e 9 eixos. A habilidade central do Polaris G-code fornece controle de movimento multi-eixo preciso e coordenado; é uma tecnologia líder do setor e possui amplitude e profundidade incomparáveis, considerando os eixos de movimento mecânico e óptico a laser.
Campo de visão infinito (IFOV)
>> Saiba Mais
Galvoscanners a laser são extremamente rápidos, mas têm um campo de visão limitado. Por outro lado, os estágios XYZ acionados por motor BLDC têm um curso longo, mas em comparação com os scanners Galvo a laser, eles são lentos. Ao combinar um estágio XYZ lento e longo com um Galvoscanner a laser rápido e curto, o melhor dos dois mundos é obtido quando a tecnologia IFOV da Polaris Motion é usada.
Comandos lineares, circulares e spline são emitidos e o caminho da ferramenta é separado em movimento de palco e movimento de laser perfeitamente.
Controle de Laser
>> Saiba Mais
O controle do laser é necessário para muitos processos de fabricação, como corte, perfuração, soldagem, gravação, gravação e estruturação de superfície. O controle preciso do laser é necessário para fusão em leito de pó (PBF) e para deposição direta de metal (DMD). Lasers são usados para processos de alteração de material, como recozimento e têmpera para metais, e modificação da impedância em semicondutores.
Para cada um desses processos, existe uma técnica preferida para controlar o fornecimento da energia do laser. As duas grandes classes de lasers são de onda contínua (CW) e pulsado. Os lasers CW são normalmente de custo mais baixo e têm a vantagem de alta potência média. Os lasers pulsados têm potência média mais baixa, mas a energia do fóton de pulso curto quebra as ligações químicas do material em vez de queimar. A zona afetada pelo calor (ZTA) é minimizada, os cortes são limpos e o pós-processamento de adição de material, como a rebarbação, geralmente é desnecessário.
Usando hardware e firmware avançados, os sistemas de controle de movimento Polaris UniverseOne ™ fornecem aos clientes a mais ampla variedade de técnicas de controle de fonte de laser para lasers pulsados e lasers CW. A potência é controlada com precisão em tempo real à medida que o laser percorre o caminho da ferramenta. A queima excessiva torna-se uma coisa do passado e os resultados de processamento da mais alta qualidade são alcançados.
Os drives Polaris UniverseOne ™, interfaces SL2-100 e outros módulos vêm equipados com uma interface de controle de laser (LCI) para fácil integração com uma ampla variedade de fabricantes de fontes de laser.
Calibração da máquina
>>Aprenda Mais
Um alto grau de precisão é necessário para muitas aplicações de máquinas-ferramenta de ponta. Para alguns equipamentos, a precisão de mícrons é necessária e, para outros, as precisões de um dígito de nanômetros são necessárias.
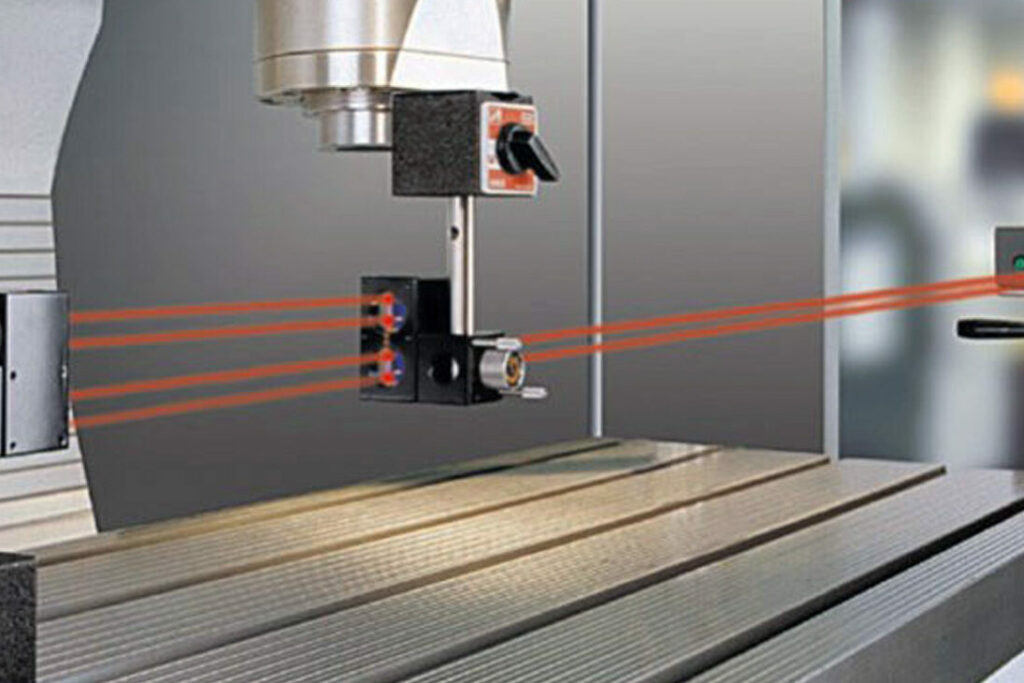
Os sistemas de controle de movimento Polaris UniverseOne ™ vêm equipados com as ferramentas que ajudam a atingir esses resultados. Técnicas são incluídas para calibração de estágio mecânico e para calibração de lentes ópticas. Em ambos os casos, é importante ter uma referência externa precisa, como o interferômetro de laser no caso do estágio mecânico ou uma placa de calibração de vidro precisa para o Galvoscanner a laser.
Calibração de Estágio Mecânico
>> Saiba Mais
Para calibração de estágio, Polaris UniverseOne ™ fornece software de controle de movimento para folga, codificador e compensação de erro abbe. Os experimentos são conduzidos e as medições de um interferômetro a laser ou rastreador são inseridos junto com os valores do codificador correspondentes. Os algoritmos Polaris UniverseOne ™ fornecem tabelas de calibração que são executadas em tempo real para uma operação precisa da máquina-ferramenta.
Calibração de Galvoscanner Óptico
>> Saiba Mais
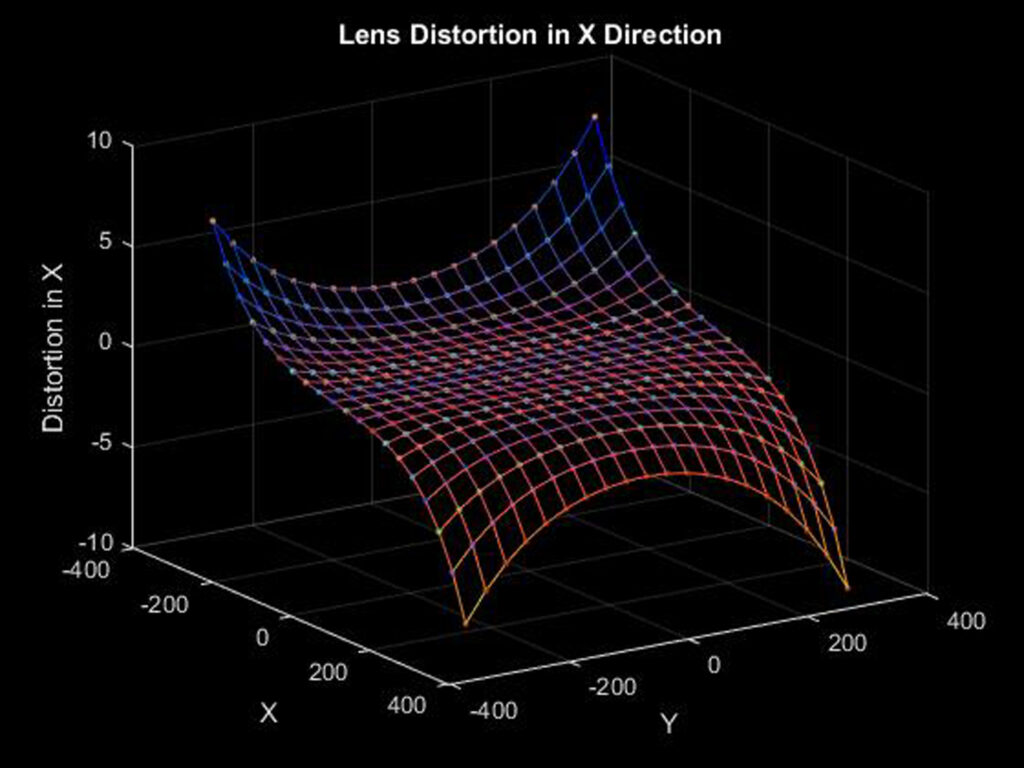
Os sistemas Polaris UniverseOne ™ oferecem ferramentas de calibração para 3rd party XY2-100, SL2-100 e HSSI Galvoscanners e para Polaris Galvoscanners nativos. Uma grade de fiduciais é criada com o Galvoscanner a laser e estes são comparados aos resultados obtidos de um sistema de visão de máquina. Um algoritmo de ajuste de curva avançado é executado para criar uma grade de calibração altamente precisa que produz resultados precisos em tempo real. A técnica se aplica a Galvoscanners 2D e 3D.
Geometria da máquina-ferramenta e do robô
>> Saiba Mais
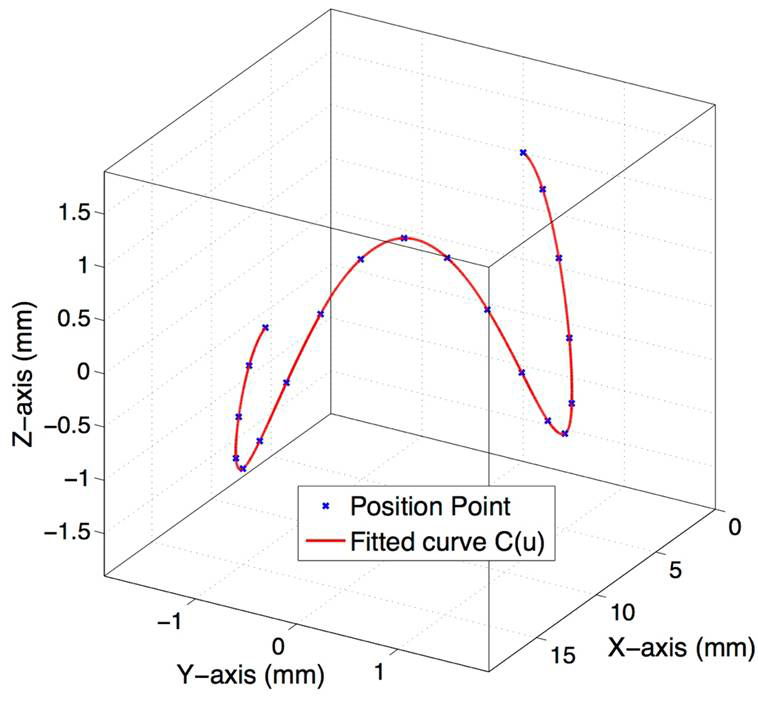
A robótica é suportada pelos sistemas de software de controle de movimento Polaris UniverseOne ™ de uma maneira única e inovadora. Os robôs podem ser manipuladores seriais, paralelos ou híbridos. O mapeamento matemático entre a pose do robô, descrito no sistema de coordenadas cartesiano, e as articulações do robô é a cinemática direta e inversa.
Os controladores Polaris UniverseOne ™ encapsulam a cinemática direta, cinemática inversa e restrições em um modelo geométrico ou mundial. Este encapsulamento cria uma abstração que permite que a descrição do movimento ocorra no espaço cartesiano.
Ao realizar este mapeamento, é criada uma separação entre a robótica, o planejamento do caminho e a geração do setpoint. Todas as ferramentas padrão podem ser empregadas, incluindo pacotes CAM padrão de 5 eixos e código G de 5 eixos.
Todos os tipos de máquina podem ser suportados dessa maneira, incluindo máquinas-ferramentas CNC de 5 eixos, robôs industriais seriais, hexápodes 6DOF precisos e muito mais.
Simulador de sistema de controle de movimento
>> Saiba Mais
Polaris UniverseOne ™ Simulator é um programa de software de controle de movimento que simula a geração de caminhos de ferramenta exatamente sem a necessidade do hardware Polaris Motion. O simulador aceita arquivos de código G como entrada e gera pontos de ajuste de posição que podem ser analisados.