6 축 로봇 정밀 공정
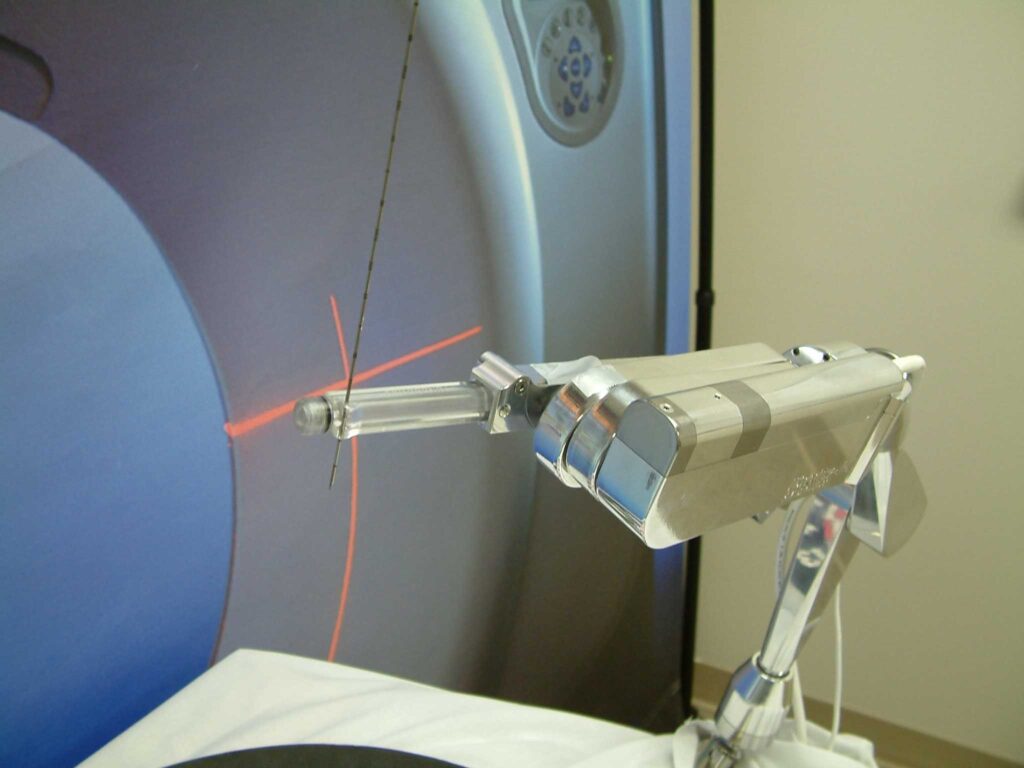
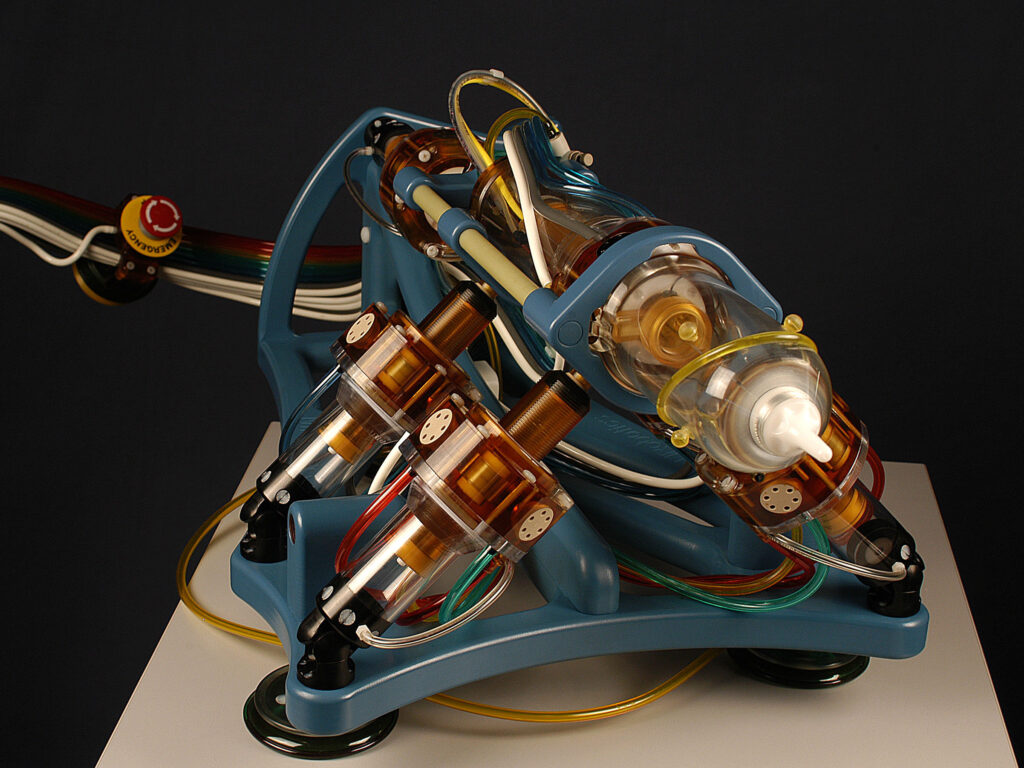
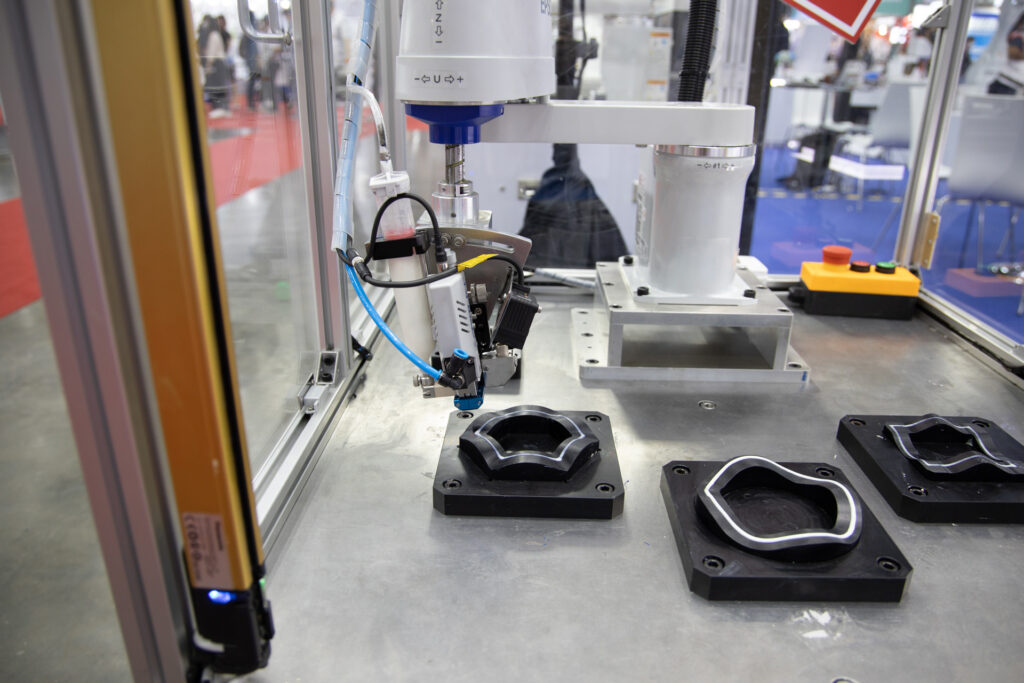
5 축 및 6 축 로봇 정밀 공정은 Polaris UniverseOne ™ 모션 제어 시스템을 사용하여 수행됩니다. 적용 범위는 레이저 절단, 레이저 용접, 에폭시 및 테이프 디스 펜싱, 도구 중심점 제어입니다.
CAM 소프트웨어를 사용하여 경로 계획을 수행 할 수 있습니다. 결과 G 코드 파일은 선, 호 및 PVT 5 차 스플라인이있는 Polaris 궤적 생성기를 사용하여 실행됩니다. 경로 세그먼트간에 자동 경로 병합이 발생합니다. 역 및 순 운동학은 로봇 데카르트 운동을 로봇 관절 운동으로 매핑합니다. 표준 XNUMX 축 CNC 공작 기계 구성 및 관절 형 로봇 암을 포함한 많은 기계 구성이 지원됩니다.
많은 응용 분야에서 공구 경로를 따라 공구와 데카르트 모션 간의 조정이 필요합니다. 레이저 용접의 경우, 공작물로의 레이저 전력 전달은 공구 경로를 따라 속도에 비례하여 이루어지며 램프 업 및 램프 다운이 관리됩니다. 에폭시 디스 펜싱의 경우 디스펜스 경로를 따라 속도는 일정하게 유지되고 디스펜스 유체는 일정한 체적 비율로 적용됩니다.
전형적인 특징
정밀 로봇 공정에 사용되는 일부 Polaris 기능은 다음과 같습니다.
- 로봇 역 운동학
- 도구 중심점 제어 (TCPC)
- PVT 큐빅 스플라인 도구 경로 생성
- 공구 경로 및 공구 전력 또는 유량의 조정 된 제어
- 데카르트 G 코드