
모션 제어 서버 소프트웨어
Polaris Server는 Polaris UniverseOne ™ 모션 컨트롤러 내부에 위치한 쿼드 코어 Intel CPU에서 Linux에서 실행되는 임베디드 모션 제어 소프트웨어 애플리케이션입니다. Polaris Server는 한쪽에서는 클라이언트 소프트웨어와 다른 쪽에서는 Mercury ™ 장치 네트워크와 통신합니다.
Polaris Server 내부에는 범용 모션 엔진, G 코드 엔진, 고속 데이터 수집 기능 및 기타 여러 기능이 있습니다. 고성능 설정 값 생성기는 축 제약 조건을 사용하여 기계의 처리량을 최대화합니다.
선형, 원형, 스플라인 보간 및 병합
다축 좌표 모션의 경우 설정 점 생성기는 프로그램 명령에 따라 선형, 원형 또는 스플라인 보간을 수행합니다. 병합은 경로 세그먼트 사이의 각도가 XNUMX이 아닐 때 적용되는 기술입니다. Polaris 설정 값 생성기는 라인-라인, 라인-아크 및 아크-아크와 같은 경로 쌍을 병합 할 수 있습니다.
최소 시간 설정 값 생성
누구와도 비교할 수없는 Polaris UniverseOne ™ 설정 값 생성기는 기계에있는 각 모터의 최대 정격을 사용하여 공구 경로를 생성합니다. 코너에 다가 가면 기계는 최대한 빨리 감속하고 코너에서 직선으로 나오면 최대한 빨리 속도를 올립니다. 모터의 속도 및 가속 한계는 절대 위반되지 않습니다. 부품 파일은 항상 가능한 최소 시간 내에 완료됩니다.
일정한 속도 설정 값 생성
공구 경로를 따라 일정한 속도를 유지하는 것은 용접 및 디스 펜싱과 같은 많은 응용 분야에서 중요합니다. 가장 느린 동작 축을 식별하고 경로의 모든 부분을 따라 일정한 속도에 도달 할 때까지 공구 경로 속도를 조정하여 가장 빠른 일정한 속도를 얻을 수 있습니다. Polaris Motion Simulator는이 절차를 수행하는 데 유용합니다.
독립 축 모션
많은 애플리케이션에서 동작 축은 독립적으로 실행되어야합니다. 기계의 모터는 서로 다른 시간에 시작하고 중지해야합니다. 이 기능은 MCI (Motion Control Interface) 라이브러리 API에서 사용할 수 있습니다.
좌표축 모션
기계의 모든 모터가 동시에 시작 및 중지되어야하는 응용 프로그램 및 프로세스에서는 조정 된 동작이 필요합니다. 모션은 2D 또는 3D 공간에서 지정할 수 있습니다. 이러한 유형의 동작은 도구가 선, 호 또는 스플라인을 정확하게 따라야하는 3D 용접 및 분배와 같은 응용 분야에서 일반적입니다. 조정 된 모션 이동은 MCI 라이브러리 API 및 G 코드를 사용하여 지원됩니다.
핸드 휠 제어
Polaris 핸드 휠 기능은 하드웨어, 펌웨어 및 소프트웨어의 조합을 사용하여 작업자가 수동 펄스 발생기를 사용하여 기계 축을 제어 할 수 있도록합니다. 이동할 축을 선택하는 데 사용한 기계식 스위치입니다. 일반적인 용도에는 기계 보정, 수동 조깅 및 도구 교체가 포함됩니다.
갠트리 축 설정 및 제어
갠트리 축에는 한 쌍의 동일한 선형 서보 모터와 드라이브가 있습니다. 서보 모터는 병렬로 배열되며 기계식 브리지로 연결됩니다. 드라이브는 동일한 설정 값을 수신하며 목표는 두 서보 모터가 동일하게 움직이는 것입니다. 이것은 Polaris 드라이브에서 실행되는 다중 입력, 다중 출력 서보 피드백 레귤레이터로 수행됩니다. 두 축은 Mercury ™ 네트워크를 통해 실시간 인코더 정보를 서로 공유하며, 모든 스큐 오류가 제거되고 갠트리가 단일 장치로 이동합니다. 갠트리는 기계적 안정성에 대한 넓은 자세를 제공하고 다리를 따라 이동하는 이동 하중을 보상 할 수 있으므로 유용합니다.
설정 값 생성기
Polaris UniverseOne ™ 설정 값 생성기는 G 코드 기능 또는 대체 프로그램에서 경로 포인트를받습니다. 포인트 사이의 거리는 크고 고르지 않을 수 있으며 좁은 간격의 설정 포인트로 간격을 채우는 것이 설정 포인트 생성기의 역할입니다. 설정 값 속도는 1kHz 일 수 있지만 20kHz, 100kHz 이상일 수 있습니다. 요금은 설정할 수 있습니다.

G 코드 언어 및 엔진
>> 더 알아보기
Polaris Motion은 1996 년부터 고급 CNC G- 코드 제어를 제공해 왔으며 Polaris UniverseOne ™ 모션 제어 시스템의 핵심 요소입니다. 우리의 구현은 EIA-RS274D G 코드 표준을 준수하며 3 축, 5 축 및 9 축 CNC 기계를 지원합니다. Polaris G-code의 핵심 기능은 정밀하고 조정 된 다축 모션 제어를 제공합니다. 이 기술은 업계를 선도하는 기술이며 기계식 및 레이저 광학 동작 축을 모두 고려하면서 타의 추종을 불허하는 폭과 깊이를 제공합니다.
무한 시야 (IFOV)
>> 더 알아보기
Laser Galvoscanner는 매우 빠르지 만 시야가 제한되어 있습니다. 반면 BLDC 모터 구동 XYZ 스테이지는 스트로크가 길지만 레이저 갈보 스캐너에 비해 느립니다. 느린 긴 스트로크 XYZ 스테이지와 빠른 짧은 스트로크 레이저 Galvoscanner를 결합하여 Polaris Motion의 IFOV 기술을 사용하면 두 가지 장점을 모두 얻을 수 있습니다.
선형, 원형 및 스플라인 명령이 실행되고 공구 경로가 스테이지 동작과 레이저 동작으로 원활하게 분리됩니다.
레이저 제어
>> 더 알아보기
레이저 제어는 절단, 드릴링, 용접, 에칭, 제판 및 표면 구조화와 같은 많은 제조 공정에 필요합니다. PBF (Powder Bed fusion) 및 DMD (directed metal deposition)에는 정밀한 레이저 제어가 필요합니다. 레이저는 금속의 어닐링 및 담금질과 같은 재료 변경 프로세스 및 반도체의 임피던스 수정에 사용됩니다.
이러한 각 공정에 대해 레이저 에너지의 전달을 제어하는 데 선호되는 기술이 있습니다. 두 가지 광범위한 레이저 클래스는 연속파 (CW)와 펄스 형입니다. CW 레이저는 일반적으로 비용이 저렴하고 평균 출력이 높다는 이점이 있습니다. 펄스 레이저는 평균 출력이 낮지 만 짧은 펄스 광자 에너지는 연소하는 대신 재료의 화학적 결합을 끊습니다. 열 영향 영역 (HAZ)이 최소화되고 절단이 깨끗하며 디버링과 같은 추가 재료 후 처리가 종종 불필요합니다.
고급 하드웨어 및 펌웨어를 사용하는 Polaris UniverseOne ™ 모션 제어 시스템은 고객에게 펄스 레이저와 CW 레이저 모두를위한 가장 광범위한 레이저 소스 제어 기술을 제공합니다. 레이저가 공구 경로를 횡단 할 때 전력이 실시간으로 정밀하게 제어됩니다. 오버 버닝은 과거의 일이되어 최고 품질의 처리 결과를 얻을 수 있습니다.
Polaris UniverseOne ™ 드라이브, SL2-100 인터페이스 및 기타 모듈에는 다양한 레이저 소스 제조업체와 쉽게 통합 할 수있는 레이저 제어 인터페이스 (LCI)가 장착되어 있습니다.
기계 보정
>>자료실 더 보기
많은 고급 공작 기계 응용 분야에는 높은 정확도가 필요합니다. 일부 장비의 경우 미크론 정밀도가 필요하고 다른 장비의 경우 나노 미터 단위의 정확도가 필요합니다.
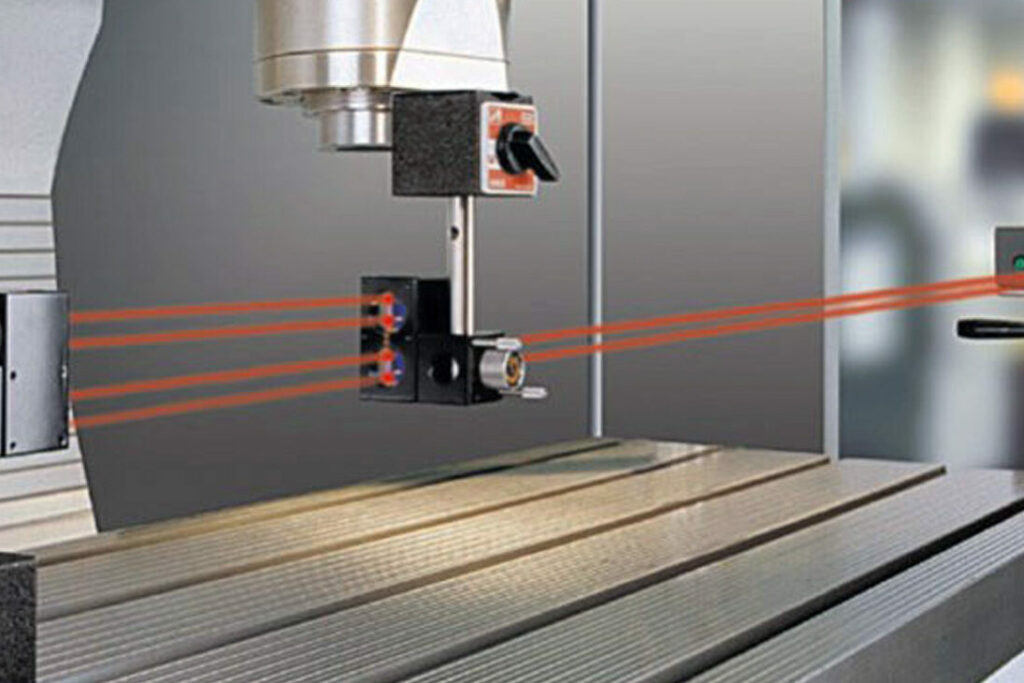
Polaris UniverseOne ™ 모션 제어 시스템에는 이러한 결과를 달성하는 데 도움이되는 도구가 장착되어 있습니다. 기계적 단계 보정과 광학 렌즈 보정을위한 기술이 모두 포함되어 있습니다. 두 경우 모두 기계적 스테이지의 경우 레이저 간섭계 또는 레이저 Galvoscanner에 대한 정확한 유리 보정 플레이트와 같은 정확한 외부 기준을 갖는 것이 중요합니다.
기계적 단계 교정
>> 더 알아보기
무대 보정을 위해 Polaris UniverseOne ™은 백래시, 인코더 및 abbe 오류 보정을위한 모션 제어 소프트웨어를 제공합니다. 실험이 수행되고 레이저 간섭계 또는 추적기의 측정 값이 해당 인코더 값과 함께 입력됩니다. Polaris UniverseOne ™ 알고리즘은 정확한 공작 기계 작동을 위해 실시간으로 실행되는 보정 테이블을 제공합니다.
광학 Galvoscanner 보정
>> 더 알아보기
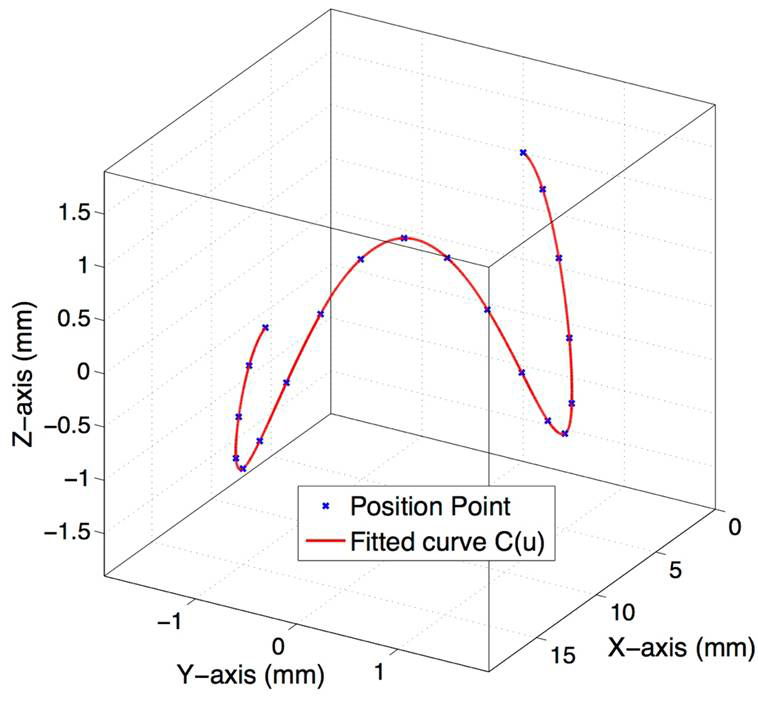
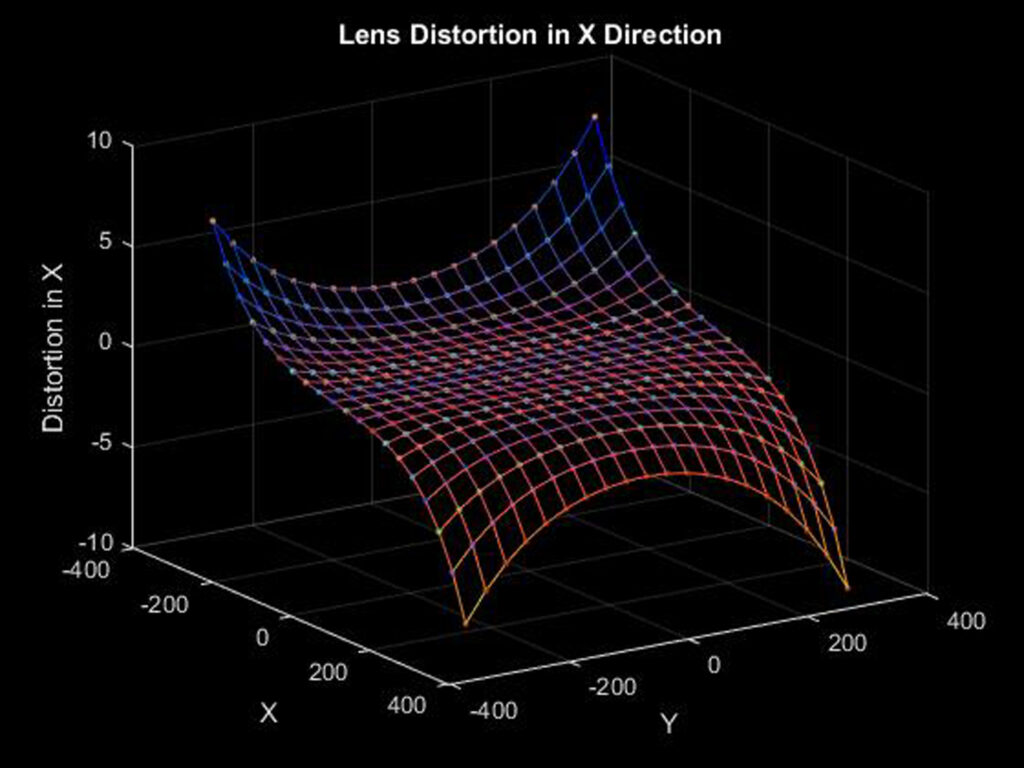
Polaris UniverseOne ™ 시스템은 3 개의 교정 도구를 제공합니다.rd 파티 XY2-100, SL2-100 및 HSSI Galvoscanner 및 기본 Polaris Galvoscanner 용. 레이저 Galvoscanner로 기준 그리드가 생성되고 머신 비전 시스템에서 가져온 결과와 비교됩니다. 고급 커브 피팅 알고리즘이 실행되어 정확한 실시간 결과를 생성하는 매우 정확한 보정 그리드를 생성합니다. 이 기술은 2D 및 3D Galvoscanner 모두에 적용됩니다.
공작 기계 및 로봇 형상
>> 더 알아보기
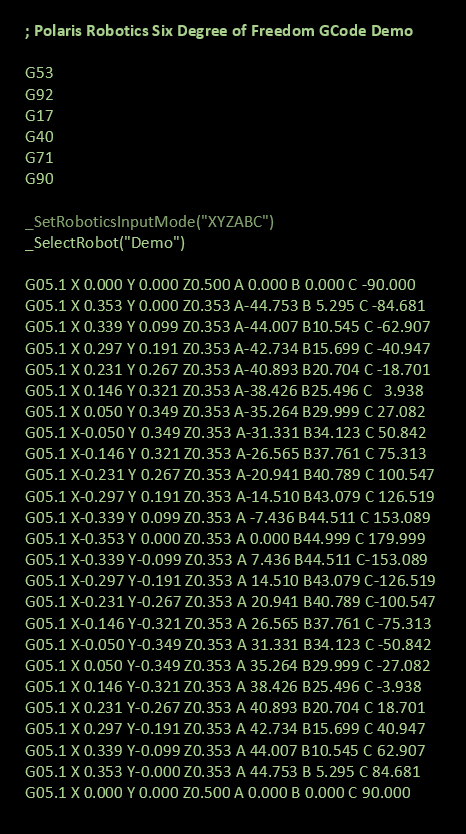
Robotics는 Polaris UniverseOne ™ 모션 제어 소프트웨어 시스템에서 독특하고 참신한 방식으로 지원됩니다. 로봇은 직렬, 병렬 또는 하이브리드 조작기가 될 수 있습니다. 데카르트 좌표계에 설명 된 로봇 포즈와 로봇의 관절 간의 수학적 매핑은 순 운동학 및 역 운동학입니다.
Polaris UniverseOne ™ 컨트롤러는 지오메트리 또는 월드 모델에서 순 운동학, 역 운동학 및 제약 조건을 캡슐화합니다. 이 캡슐화는 데카르트 공간에서 발생하는 모션 설명을 허용하는 추상화를 생성합니다.
이 매핑을 수행하면 로봇 공학, 경로 계획 및 설정 값 생성이 분리됩니다. 표준 5 축 CAM 패키지 및 5 축 G 코드를 포함한 모든 표준 도구를 사용할 수 있습니다.
5 축 CNC 공작 기계, 직렬 산업용 로봇, 정밀 6DOF 헥사 포드 등 모든 기계 유형을 이러한 방식으로 지원할 수 있습니다.
모션 제어 시스템 시뮬레이터
>> 더 알아보기
Polaris UniverseOne ™ Simulator는 Polaris Motion 하드웨어 없이도 공구 경로 생성을 정확하게 시뮬레이션하는 모션 제어 소프트웨어 프로그램입니다. 시뮬레이터는 G 코드 파일을 입력으로 받아들이고 분석 할 수있는 위치 설정치를 생성합니다.