2D, 2.5D 및 3D 정밀 레이저 제조
Polaris UniverseOne ™ 모션 제어 시스템은 정밀 레이저 제조를 위해 설계되었습니다. 2D, 2.5D 및 3D 레이저 미세 가공 및 정밀 딥 제판과 같은 애플리케이션에서 다중 스캔 헤드 3D 금속 인쇄 애플리케이션에 이르기까지 Polaris UniverseOne 시스템은 동급 최고의 레이저 CNC 공작 기계를 만드는 데 필요한 도구와 기술을 갖추고 있습니다. .
부품은 AutoCad, Fusion 360, Inventor, SolidWorks, CATIA 등과 같은 CAD 프로그램을 사용하여 설계됩니다. 설계는 2D, 2.5D 및 실제 3D 일 수 있으며 부품을 설명하는 출력 파일은 DXF 파일 (2D), STL 파일 (2.5D) 또는 STEP 파일 (3D) 일 수 있습니다. 가장 많이 사용되는 파일 형식이지만 다른 형식도 있습니다.
추가, 감산, 접합 및 재료 변형으로 분류되는 많은 정밀 레이저 제조 공정이 고려되었습니다. 추가 카테고리에는 SLA, SLS 및 SLM이 있습니다. 빼기 범주에는 절단, 드릴링, 제판, 에칭 및 제거가 있습니다. 용접은 접합 과정입니다. 일부 재료 변환 프로세스에는 임피던스 수정 및 금속 어닐링이 포함됩니다.
궤적 생성기
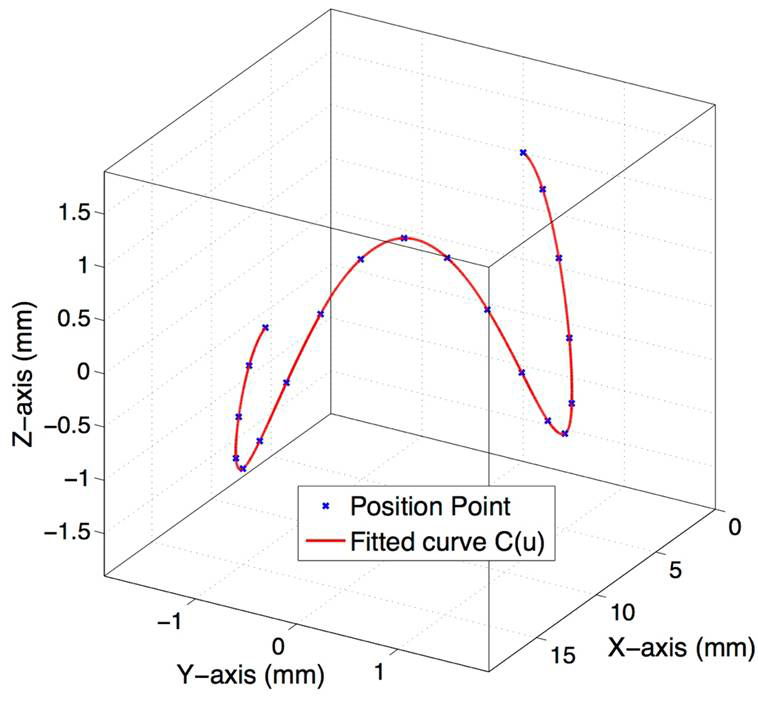
CAM 소프트웨어는 데카르트 선, 호 및 스플라인 원형을 Polaris UniverseOne ™ 컨트롤러로 내 보냅니다. 높은 수준의 지능을 사용하는 Polaris 설정 점 생성기는 기계식 스테이지 축과 레이저 광학 Galvo 스캐너 축의 속도 및 가속 기능을 평가합니다. 이 평가를 통해 Polaris UniverseOne ™ 컨트롤러는 기계가 작동 할 수있는 한 빨리 가공 프로그램을 실행합니다. 작업자가 기계에 가능한 것보다 더 빨리 가라고 명령하면 소프트웨어가 실행 속도를 늦추고 작업이 가능한 최소한의 시간에 완료 될 때까지 실행됩니다.
Polaris CAD / CAM
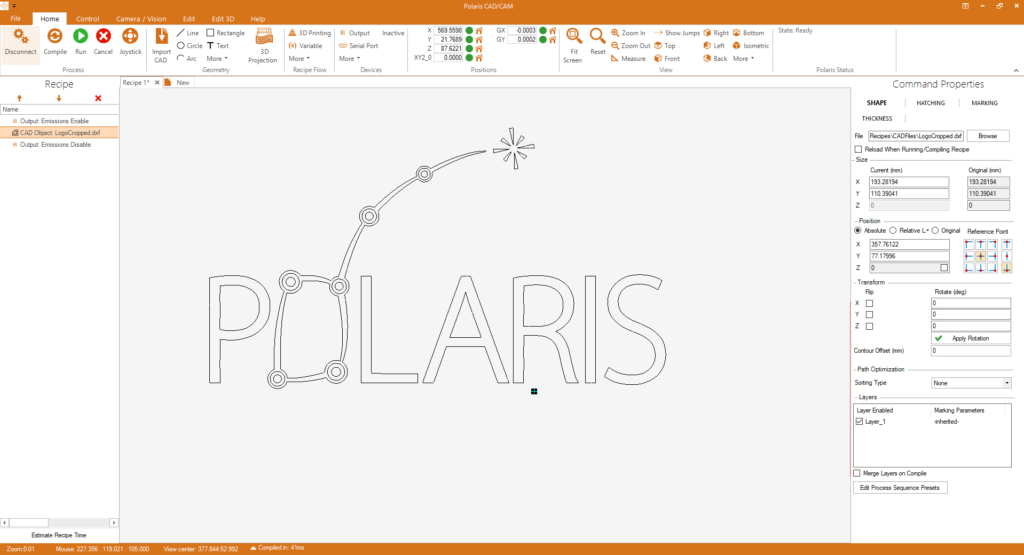
Polaris CAD / CAM (PCC)은 레이저 CNC 기계를 제어하는 데 사용되는 소프트웨어입니다. 위에서 언급 한 모든 레이저 재료 가공 작업은 PCC를 사용하여 이점을 얻을 수 있습니다.
2D 프로세스의 경우 DXF 파일을 PCC로 가져오고 절단, 드릴링 및 해칭을 준비하기 위해 속성을 설정합니다. 소프트웨어는 최적화 된 경로 계획에 따라 자동으로 공구 경로를 생성합니다. 작업자가 RUN을 누르면 G 코드 파일이 생성되어 실행을 위해 Polaris UniverseOne ™ 모션 컨트롤러로 즉시 전송됩니다.
적층 제조의 경우 XNUMX 차원 STL 파일을 가져 와서 컨투어링, 채우기 및 지지체 생성에 대한 속성을 정의합니다. PCC는 STL 파일을 잠재적으로 수천 개의 레이어로 분할합니다. 하나 이상의 스캔 헤드를 사용할 수 있습니다. 여러 스캔 헤드를 사용하는 경우 부품이 타일로 분리되고 도구 경로가 생성되고 각 Galvo 스캐너에 대해 G 코드 파일이 생성됩니다. 겹치는 영역을 함께 묶기 위해 고급 방법이 사용됩니다.
구와 같은 3D 부품의 깊은 금속 조각과 같은 진정한 3D 감산 응용 프로그램의 경우 3D STEP 파일을 PCC로 가져오고 2.5D 패턴을 구에 래핑합니다. 5 축 CNC 기계에서 실행할 수있는 공구 경로가 자동으로 생성됩니다.
높은 생산성을 위해 5 축 CNC 스테이지와 3D Galvoscanner를 함께 사용할 수 있습니다. 공구 경로가 생성되고 G 코드 파일이 Polaris UniverseOne ™ 모션 컨트롤러로 전송됩니다. Polaris Motion의 고유 한 5 축 IFOV (Infinite Field of View) 알고리즘이 실행되고 툴 경로가 자동으로 스테이지 및 스캐너 모션으로 분리됩니다.
>> 더 알아보기
데카르트 G 코드
Polaris UniverseOne ™ 모션 컨트롤러를 사용하면 Cartesian G 코드를 사용하여 생산성이 향상됩니다. 공구 경로는 공작물 좌표계에서 공구 팁 위치에 대해 정의됩니다. 기계 형상은 역 운동학을 사용하여 분리됩니다. 이 새로운 접근 방식은 CAM이 기계 형상에 대해 걱정할 필요가 없기 때문에 컴퓨터 지원 제조 (CAM)를 더 쉽게 만듭니다.
>> 더 알아보기
로봇 공학 및 기계 기하학
공구 위치와 방향을 모터 움직임에 매핑하는 기계 형상은 기계의 운동 학적 제약과 함께 월드 파일에 캡슐화됩니다. Polaris는 일반적인 머신 유형에 대한 머신 지오메트리 라이브러리를 개발했습니다. 로봇 도구를 사용하여 기계 형상을 구현하고 부품 파일 좌표계에서 데카르트 도구 경로 동작을 표현함으로써 5 축 CAM 프로그램에서 레이저 도구 경로를 쉽게 생성 할 수 있습니다.
>> 더 알아보기
레이저 제어 인터페이스 (LCI) 기술
Polaris UniverseOne ™ 서보 모터 드라이브, 스테퍼 모터 모듈 및 Galvo 제어 모듈에는 레이저 제어 인터페이스 (LCI)가 기본으로 장착되어 있습니다. Polaris Motion의 특허받은 Gbps 모션 제어 네트워크로 인해 모든 모듈에서 나노초 동기화가 이루어지며 LCI 연결이있는 모든 모듈을 사용하여 레이저를 제어 할 수 있습니다.
LCI는 펄스 레이저와 연속파 (CW) 레이저를 제어 할 수 있습니다. 펄스 모드에서는 고정 피치 트리거링 및 주문형 펄스 (POD) 트리거링을 사용할 수 있습니다. MHz 단위의 맥박이 가능합니다. CW 레이저의 경우 PWM 제어를 사용하여 속도로 전력을 조절할 수 있으며 아날로그 레이저 펄스 성형 (ALPS ™)을 사용하여 레이저 용접과 같은 민감한 프로세스를 미세 조정할 수 있습니다.
>> 더 알아보기