Réseau de contrôle de mouvement en temps réel haute vitesse Mercury ™
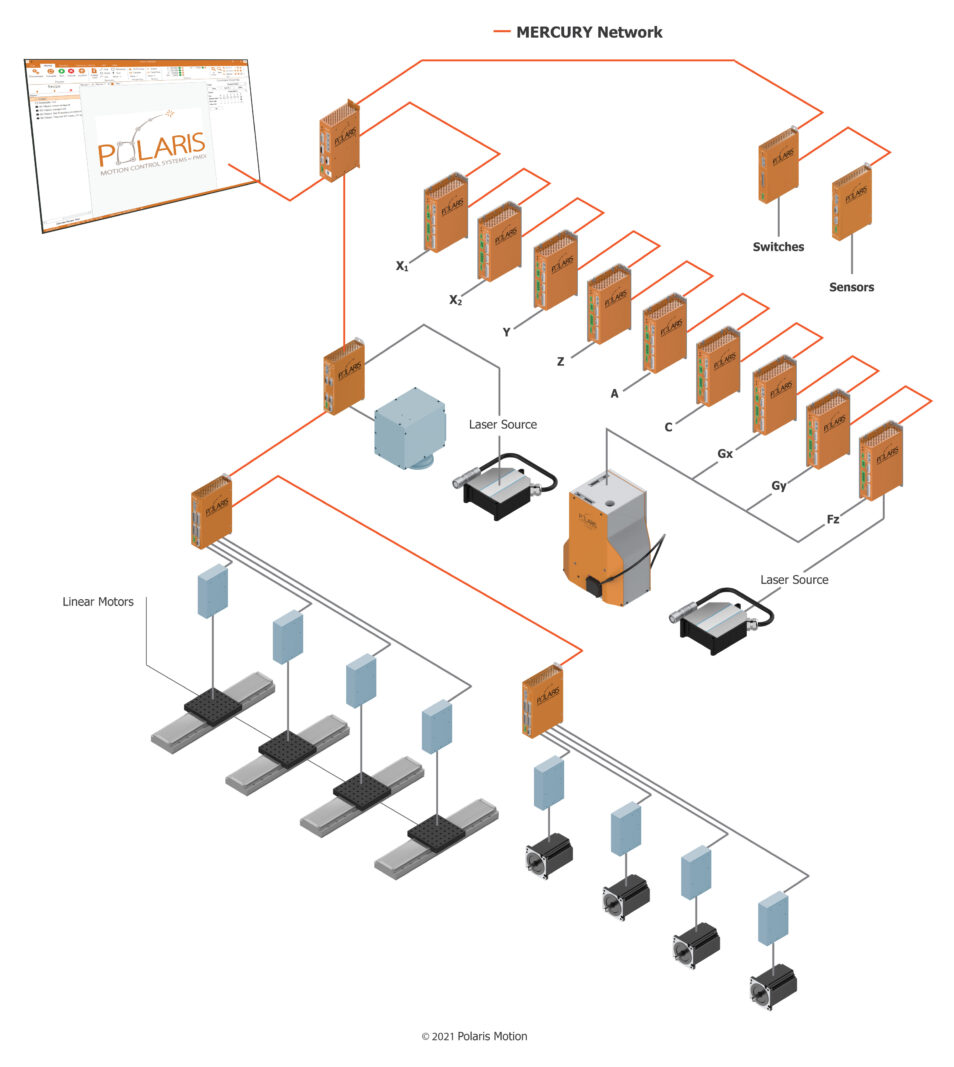
Mercury ™ est le réseau de contrôle de mouvement ultra-rapide breveté de Polaris Motion. Il est utilisé pour connecter un Polaris UniverseOne ™ contrôleur avec lecteurs, E / S et autres périphériques. Un contrôleur dispose de 4 ports, chacun prenant en charge une connexion en guirlande de jusqu'à 31 appareils pour un maximum de 124 appareils sur un réseau Mercury ™.
Etats-Unis en matière de brevets 8,363,680
Brevet européen 2494742 B1
Un réseau Mercury ™
a quatre protocoles:
1. Protocole synchrone
2. Protocole asynchrone
3. Protocole de streaming
4. Protocole temporel
Mercury™ Protocole de communication réseau
1.Le protocole synchrone, les points de consigne de position sont envoyés du contrôleur à chacun des variateurs à distance sur le tick du signal SYNC. Simultanément, les données sont collectées à partir des disques à la même fréquence, au même signal SYNC et renvoyées au contrôleur pour stockage ou analyse. En utilisant le signal SYNC, des débits de consigne de 1 kHz à 200 kHz peuvent être atteints pour les configurations de machine multi-axes.
2.La protocole asynchrone utilise un logiciel exécuté sur le contrôleur pour demander des informations telles que la position actuelle, la température du variateur et d'autres variables de la machine à partir des registres du variateur.
3.La protocole de streaming est utilisé pour programmer les variateurs, les E / S numériques, les E / S analogiques et les autres périphériques réseau Mercury ™ avec un nouveau micrologiciel.
4.La protocole temporel est une technologie sophistiquée qui garantit que chaque appareil du réseau Mercury ™ est synchronisé les uns avec les autres en quelques nanosecondes.
Périphériques pris en charge
Il existe une liste complète des appareils disponibles pour le réseau de commande de mouvement Mercury ™. Ceux-ci inclus:
- Contrôleur de mouvement Polaris UniverseOne ™
- Variateurs PWM monophasés et triphasés
- Entraînements linéaires monophasés et triphasés
- Entraînements de galvanomètre
- Digital I / O
- E / S analogiques
- Modules d'interface servo pour 3rd Systèmes de servomoteurs de fête
- Modules d'interface pas à pas pour 3rd Systèmes de moteur pas à pas Party
- Modules de scanner XY2-100 Galvo
- Modules de scanner Galvo SL2-100
- Modules de scanner HSSI Galvo
- Scanners Polaris 2D et 3D Galvo
- Dispositifs spécialisés pour les clients OEM
Performance
Le réseau breveté de contrôle de mouvement Mercury ™ de Polaris Motion a été optimisé pour les applications de contrôle de mouvement haute performance. Il a été conçu pour prendre en charge les architectures de machines les plus exigeantes. Le protocole peut prendre en charge la communication d'un seul contrôleur de mouvement vers plusieurs machines CNC ou robots. Il peut être utilisé pour contrôler un ensemble de têtes de numérisation 3D pour les applications AM métalliques. Certaines fonctionnalités du réseau Mercury ™ incluent:
- 4 ports en temps réel à 1 Gbps par port
- Transmission de données bidirectionnelle
- 125 appareils dont le contrôleur
- Communication de données synchrone
- Communication de données asynchrone
- Protocole de streaming pour la programmation
- Protocole de temps pour la synchronisation