機械OEM向けの使いやすい統合レーザーベースのモーションコントロールソリューション
精密機械の設計者が新しいプロジェクトを計画するときは、パフォーマンス、システムの製造と保守にかかるコスト、および使いやすさを考慮する必要があります。 ユーザーフレンドリーなモーションコントロールシステムには、開発コストを削減し、市場投入までの時間を最小限に抑えるという利点があります。 これを念頭に置いて、Polarisモーションコントロールシステムは、構成可能性と高性能を犠牲にすることなく、簡単にインストールできるように設計されています。
強力なハードウェアのエコシステムを作成し、豊富なソフトウェアを備えています。 このエコシステムにより、お気に入りのサーボモーター、エンコーダー、その他の周辺機器を、スマートモーションコントロール機能を備えた最終的な工作機械製品に統合できます。 簡単な機械構成に加えて、Polaris CAD / CAMを使用して高度な機械加工操作を簡単に実装できます。
Polarisモーションコントロールシステムのセットアップと使用
PolarisUniverseOne™制御システムの配線
Mercury™ネットワークの構成は簡単な作業です。 自動列挙と自動構成により、デバイスは起動時に自動的に識別および構成されます。
MotionToolsを使用した簡単な構成と調整
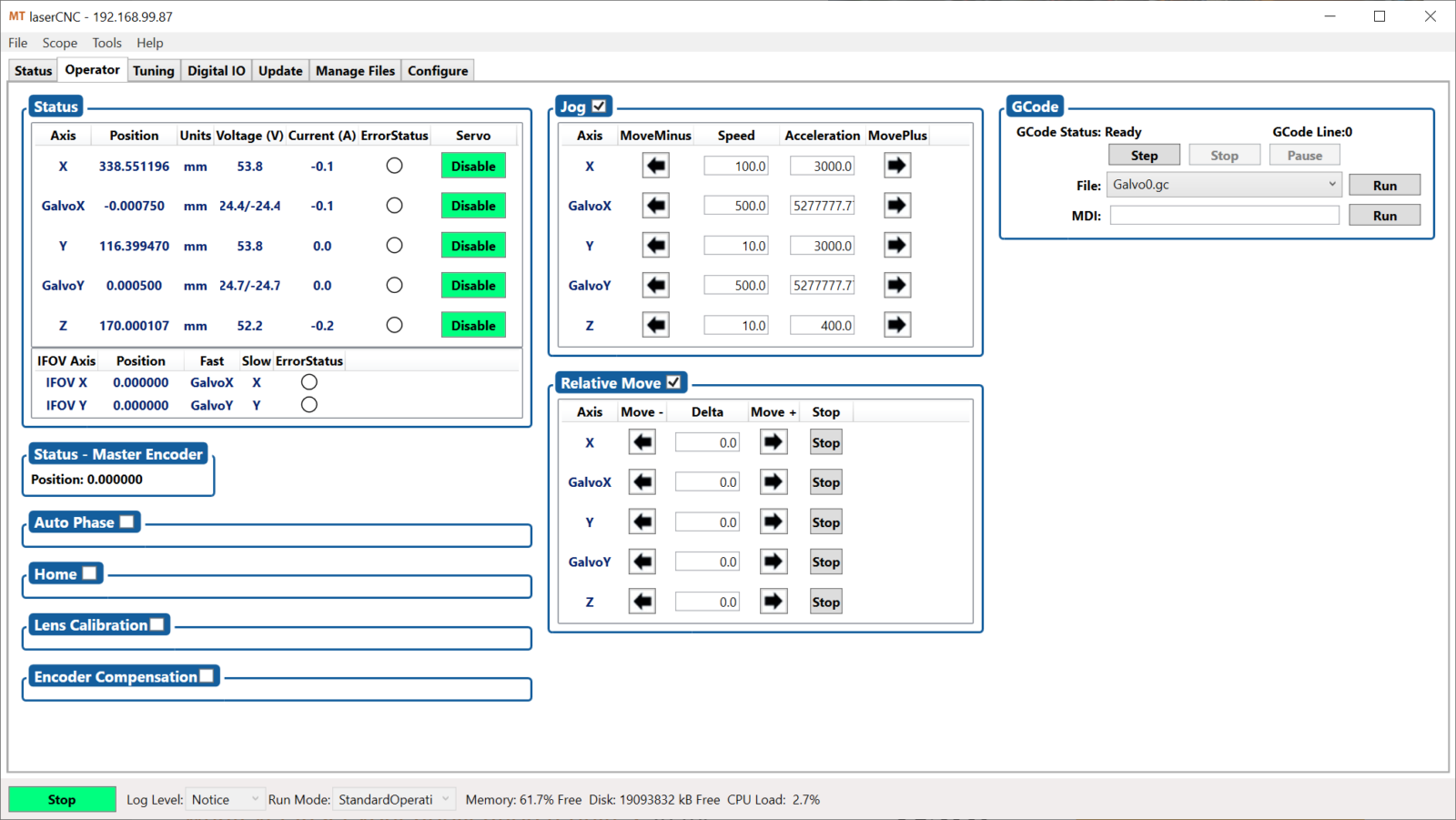
ネットワークと電気が配線されたら、MotionToolsに移動します。これは、ネットワーク上のPolarisコントローラー、ドライブ、およびその他のデバイスとのインターフェイスを可能にするデスクトップアプリケーションです。 MotionToolsには、強力なグラフィカルチューニングユーティリティ、フル機能のリアルタイムスコープ、およびレーザーを多軸マシンに統合できるユーザーフレンドリーなウィザードがあります。

MotionToolsは非常に論理的な方法で編成されており、サーバープログラミングはソフトウェア開発者にとって理解しやすいものです。
ルイス·ガルシア
ソフトウェアエンジニアリングチームリーダー
Mundt&Associates、Inc。
高度なレーザートリガーツールキットの探索
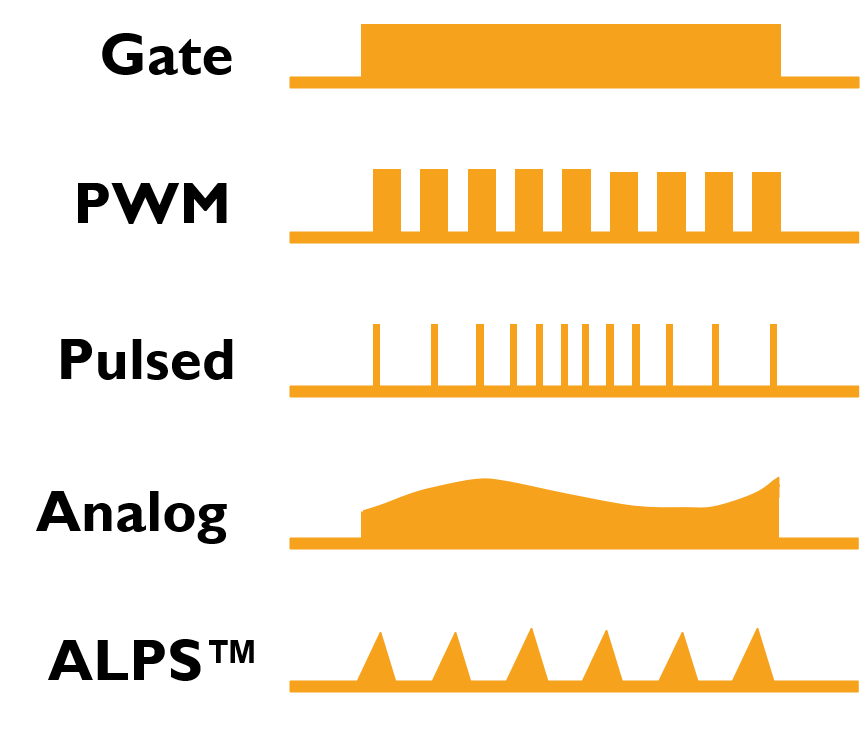
何年にもわたってお客様の声に耳を傾け、お客様のフィードバックを真剣に受け止め、 アプリケーションに必要なレーザーを制御するための広範なツールキットを作成しました。 Polaris Motionトリガーツールキットには、レーザートリガーの3つの主要なモードがあります(図XNUMX)。 独自の任意レーザーパルス整形(ALPS™)モードを含む、パルスレーザーと連続波(CW)レーザーの両方のオプションがあります。 XNUMX回の操作でXNUMXつ以上のレーザー光源を必要とするアプリケーションがある場合、当社のツールキットはマルチレーザートリガーをサポートします。 これらのモードはすべて、簡単に実装およびカスタマイズできます。 さらに、いくつかの自動レーザー制御機能が利用可能です。 これらには、自動周波数および自動デューティサイクルのPWMトリガーモードが含まれ、溶接などの高感度の操作を、推測作業なしで毎回再現可能で高品質にします。
スカイライティングを固定ピッチトリガーに置き換えて、パーツ処理時間を短縮します
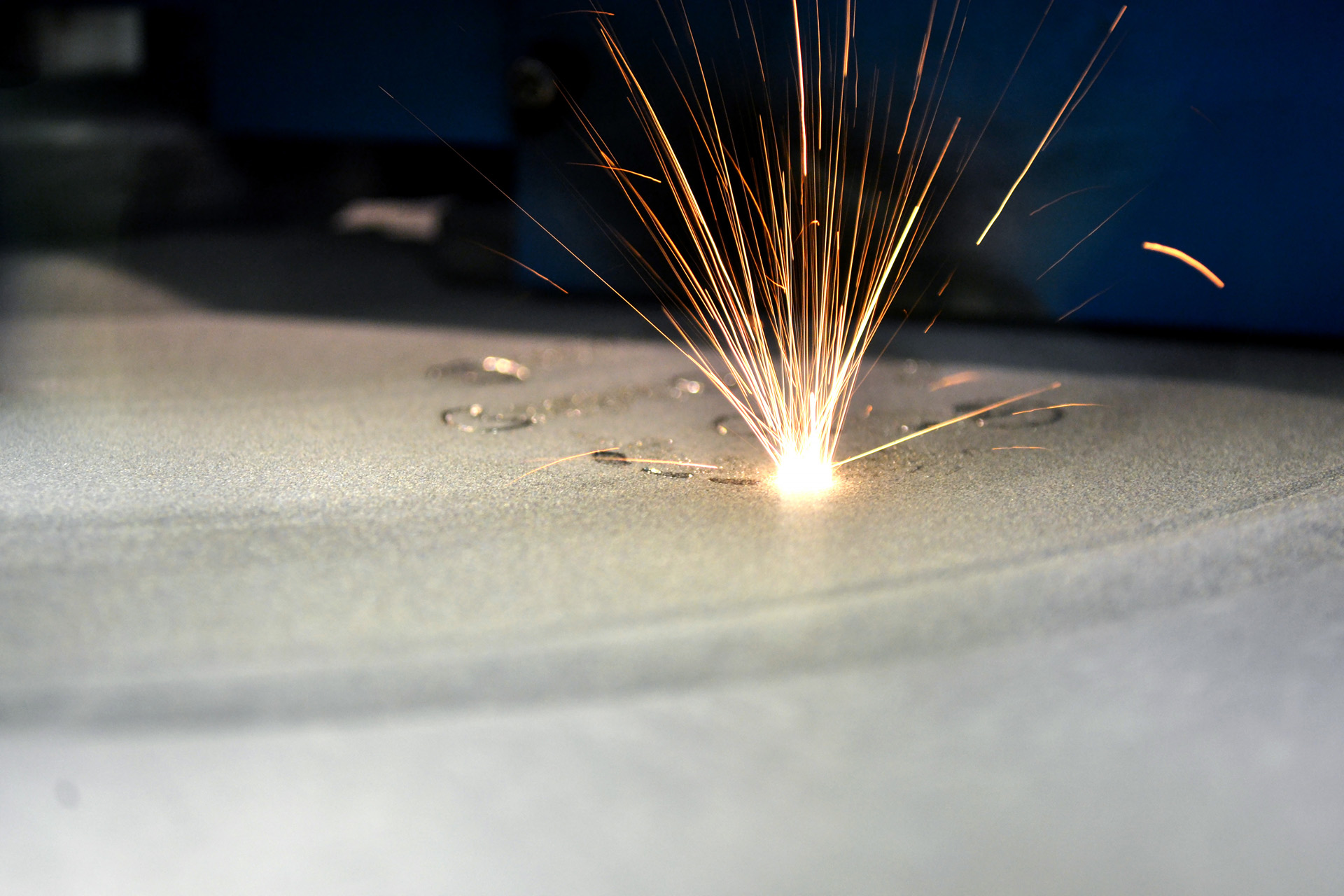
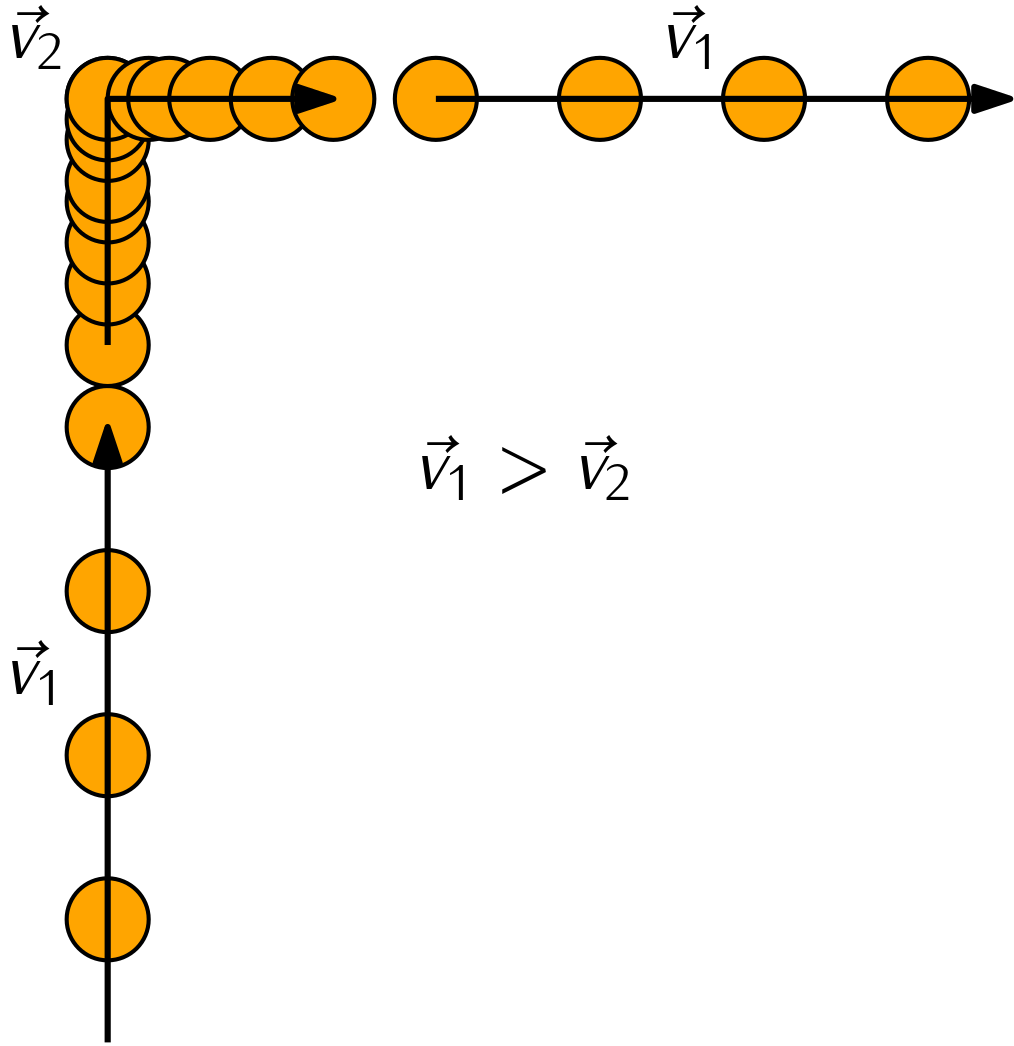
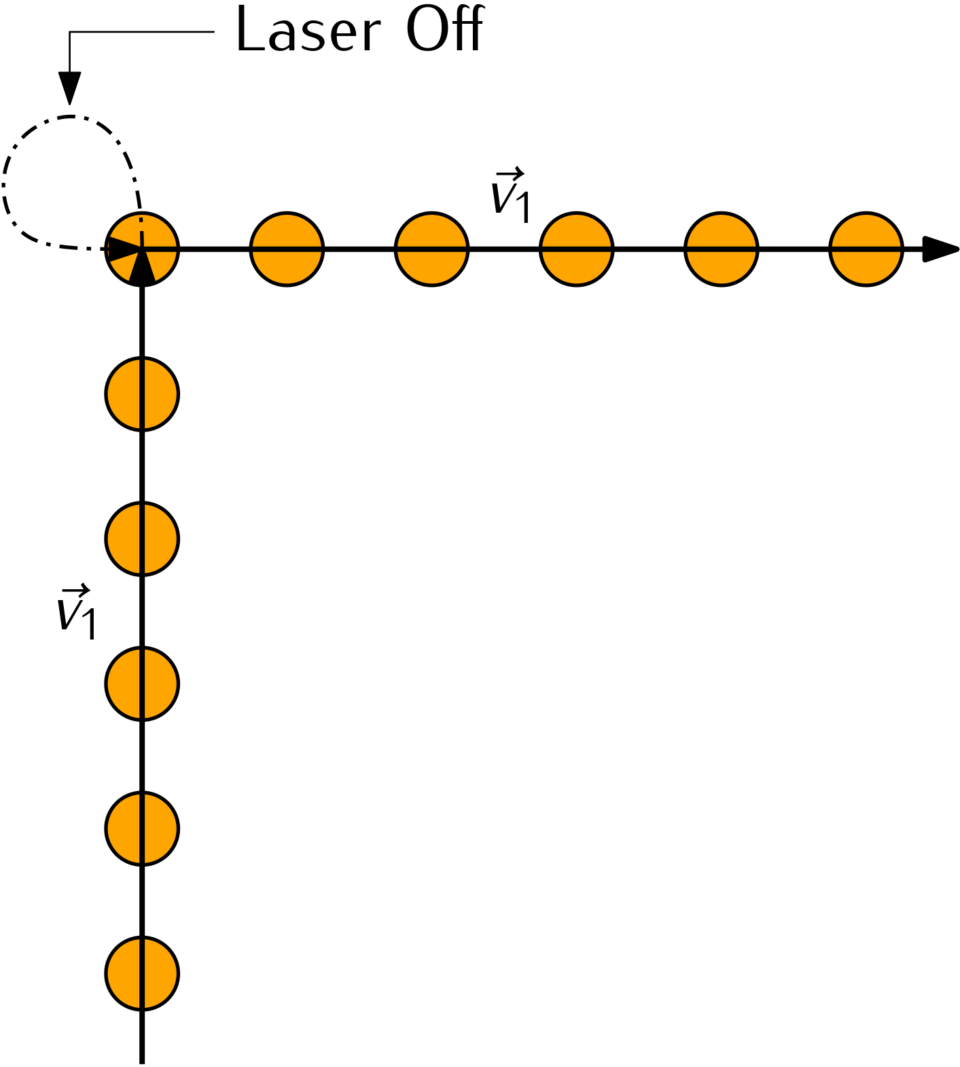
レーザーベースの材料加工では、単位面積(フルエンス)あたりにワークピースに供給されるエネルギーが最も重要です。 理想的なシナリオは、計画された軌道に沿ったすべてのポイントでフルエンスを一定に保つことです。 固定のレーザーパルスレートを使用していて、コーナーでマシンの速度を落とす必要がある場合、過燃焼(フルエンスの増加)が発生します(図4)。 この問題は、多くの場合「スカイライティング」と呼ばれるモーションベースのソリューションを実装することで解決されます。 スカイライティングを有効にすると、コーナーで一定の速度が維持され、固定されたレーザーパルスレートから一定のフルエンスが得られます。 Skywritingは、レーザーが正確にオフになり、モーションがループされ、マシンが必要なマーキング位置と速度に達するとレーザーが再びオンになるコーナーに余分な動きを追加することで、この結果を実現します(図5)。
優れたソリューション
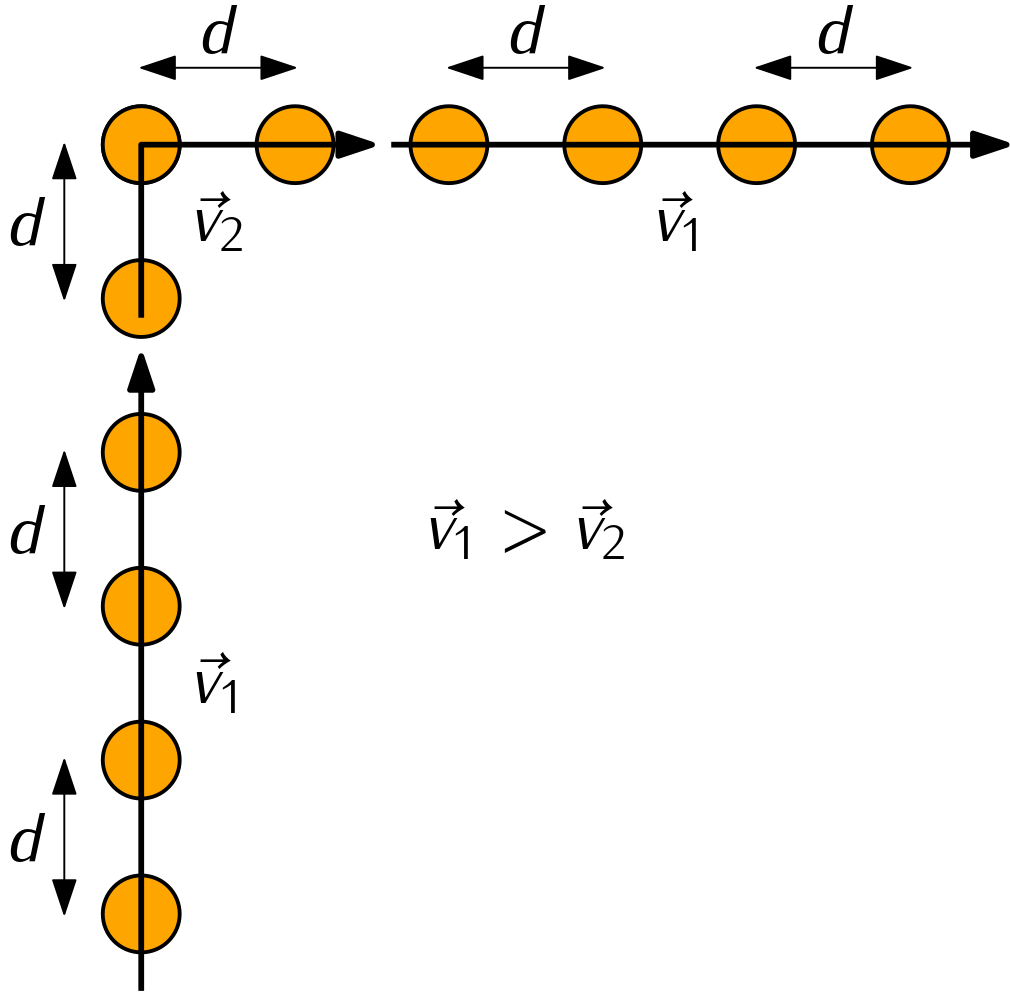
スカイライティングは一定のフルエンスを実現しますが、処理時間が大幅に長くなり、制作には望ましくありません。 Polaris Motionは、速度、加速度、ジャークに依存しない、レーザー出力の改善されたソリューションを開発しました。 当社の固定ピッチレーザートリガーハードウェアアルゴリズムは、計画されたマーキングパスに沿って移動した距離に基づいてレーザーを発射します(図6)。 私たちのスペーシングベースのアプローチは、コーナーで最大の処理速度を可能にします。 それは無駄な動きを生み出しません。 そして最も重要なことは、それは優れた一貫した材料処理のための安定したフルエンスを提供します。
Polarisを使用すると、パルスレーザーのセットアップが非常に簡単になり、固定ピッチのトリガーは、私が使用した中で最もクールな機能のXNUMXつでした。 レーザー出力の変数として速度と周波数を取り除きながら、一貫した表面マーキングを提供しました。
アンドリュー・ハーグリーブ
Automation Engineer
DynaVap、LLC
レーザートリガーモードを変更するときにシステムを再配線する必要はありません
プロジェクトに代替トリガーモードが必要な場合は、周辺配線の変更に慣れている可能性があります。 これは、ポラリスモーションには当てはまりません。 代替の、より柔軟なレーザー制御方法を作成しました。 Polaris制御システムから選択したレーザーにデジタル出力をルーティングするだけです。 この出力は、レーザートリガーハードウェアアルゴリズムに従ってレーザーをトリガーするために必要な情報を送信します。 複雑なエンコーダの再配線や接続は必要ありません。 Polaris CAD / CAMでは、ドロップダウンメニューからレーザートリガーモードを簡単に変更できます。
Polaris CAD / CAMを使用すると、ツールパスの生成と機械操作が簡単になります
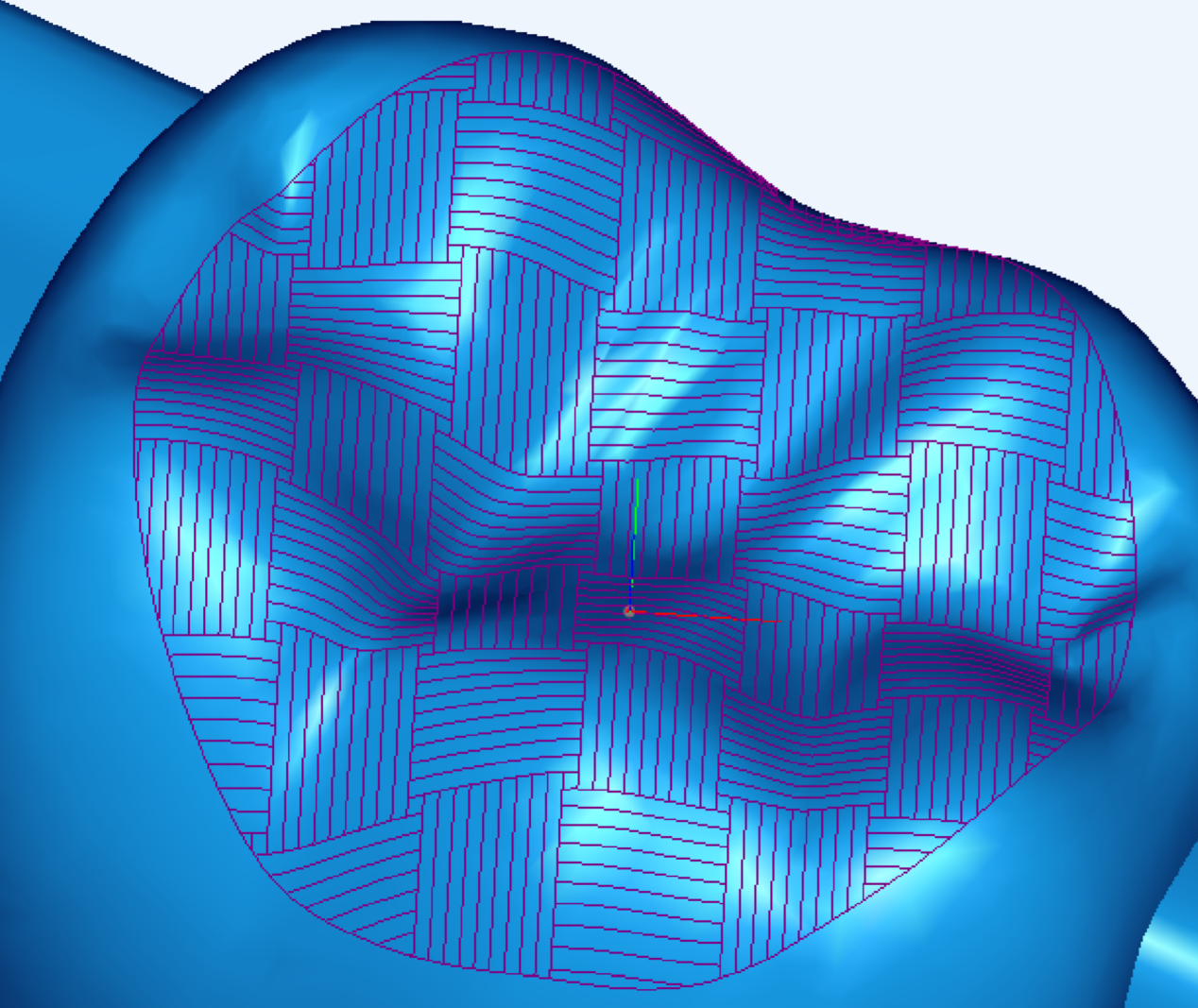
PolarisモーションコントロールシステムをPolarisCAD / CAMとペアリングするときに、オールインワンソリューションを作成します。 このソフトウェアを使用すると、CAD図面をインポートし、マーキングパラメータを設定し、Gコードツールパスをすばやく簡単に生成できます。 ツールパス出力は、CAD / CAMからPolarisコントローラーに自動的に送信されて実行されます。 Polaris CAD / CAMは高度なマシンビジョン機能を備えており、効率的で堅牢なレンズキャリブレーションレシピを設定できます。 円筒形オブジェクトへの彫刻などのアプリケーション用に、3Dオブジェクトへの投影を計算することもできます(図7)。 アプリケーションが何であれ、CAD / CAMは、ツールパスの生成をシンプルかつ高速にするように構築されています。
PolarisコントローラーはGコードを自動的に解釈します
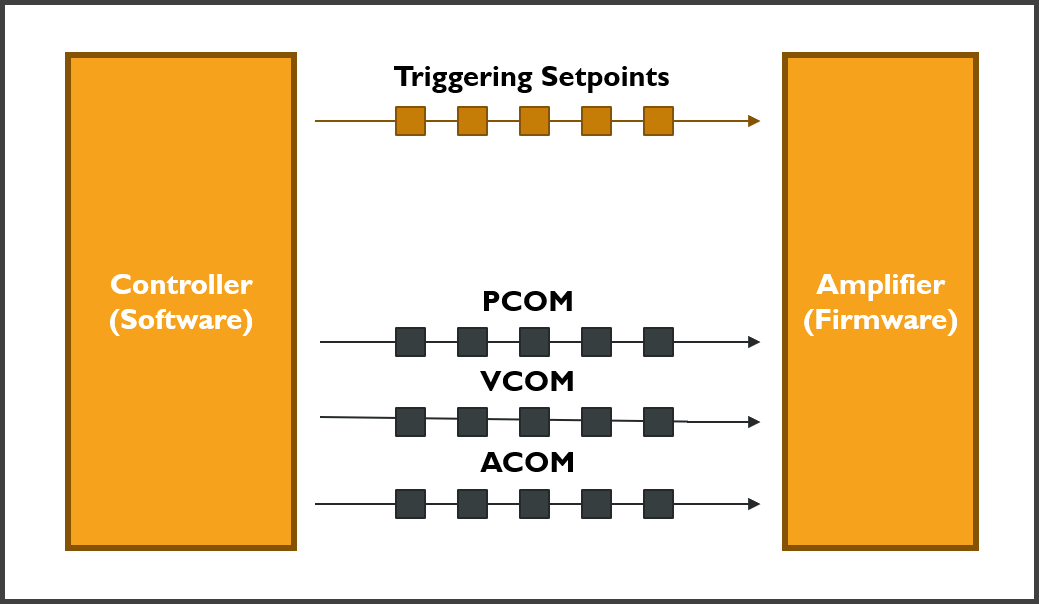
サーボ軸とレーザー光源が構成され、Gコードファイルを実行する準備ができたら、Polarisコントローラーが残りの作業を行います。 PolarisコントローラーはGコードを解釈し、移動コマンドを動的設定値に変換し、同期されたレーザートリガー設定値を自動的に送信します(図8)。 私たちのシステムは、事実上すべてのリニアまたはロータリーサーボモーター、ステッピングモーターをサポートし、SL2-100、HSSI、XY2-100などの標準のGalvoscannerインターフェイスプロトコルにコマンドを送信できます。
Polaris Infinite Field of View(IFOV)
レーザー材料の処理にGalvoscannerを使用する場合、視野(FOV)は、収容できる最大部品サイズを決定する制限要因です。 この欠点は、スキャンヘッドをデカルトステージに統合して、より大きな部品を可能にすることで回避されることがよくあります(図9)。 高速のガルボモーターを低速のロングストロークステージアクチュエータと組み合わせる従来の方法は、次の方法を使用することです。 タイリング (図10)。
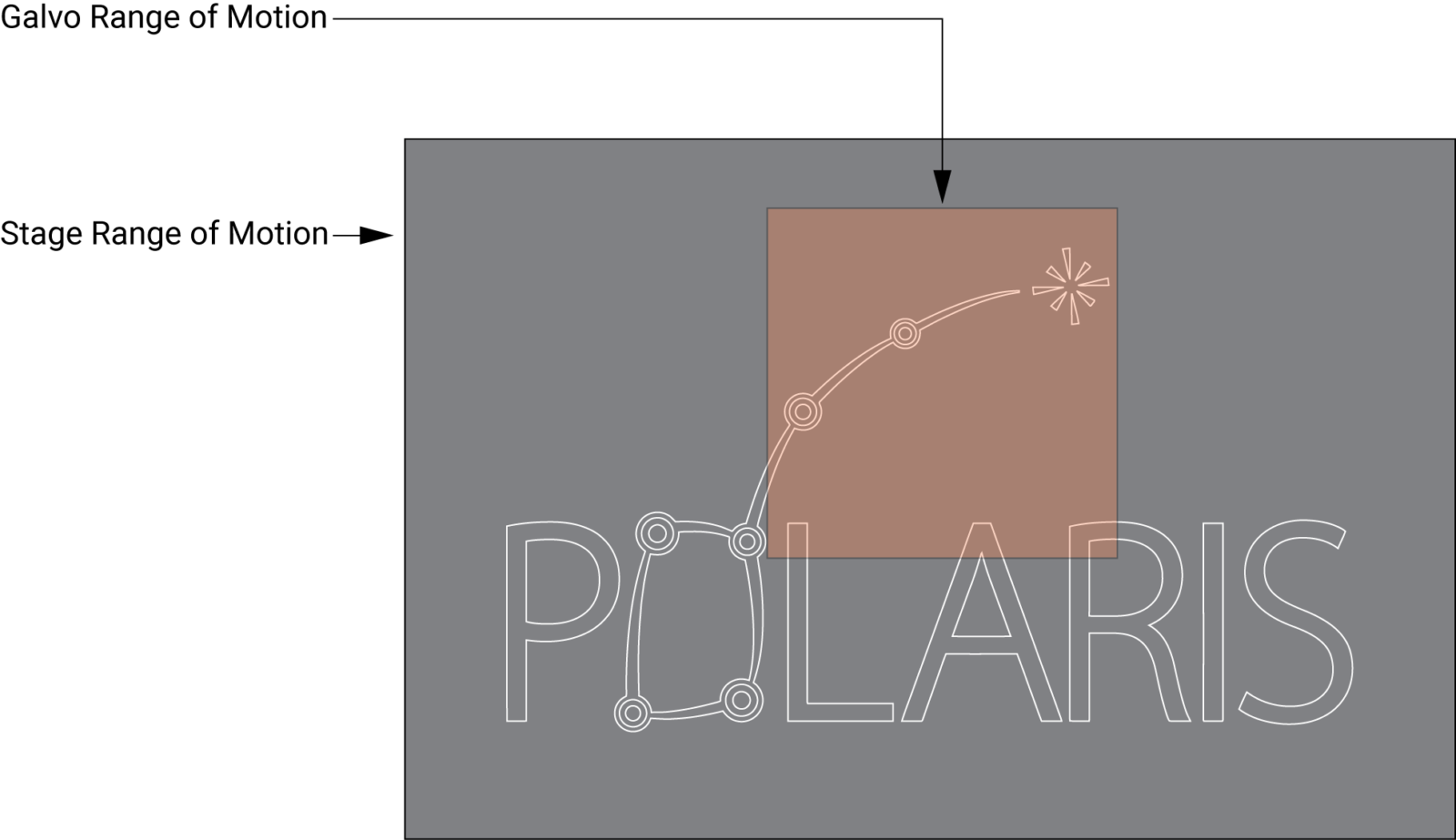
IFOVは、タイリングよりも改善されたソリューションです。 IFOVは、レーザー材料の処理に使用される技術であり、ステージを使用してガルボスキャナーを広いマーキング領域上をスムーズかつ連続的に移動させます(図11)。 この手法は、の一般的な問題を解決します ステッチエラー タイリングを使用するときに発生します。 ステッチングエラーは、タイル状のセクションの継ぎ目に沿って表示されるレーザーパスの不整合です(図12)。 ガルボスキャナーとIFOV技術を使用したステージの利点を組み合わせることで、大きな部品を非常に詳細に高速でレーザー加工することが可能になります。
ポラリス IFOVは、わずかXNUMXつの設定を使用して完全に構成されます。 XNUMXつの設定で軸を定義します。 残りの設定のうち、XNUMXつはIFOVのオン/オフを切り替え、残りのXNUMXつはステージとGalvoscanner間のモーション分布の重み付けを定義します。
Polaris Motionのバックグラウンドは、CNC工作機械の制御です。 そのため、私たちのIFOV技術は、標準のGコードファイルと完全に互換性があります。 これには、線形補間(G1)、円補間(G2 / G3)、スプライン補間(G5)、作業座標変換、ツールオフセットなどが含まれます。 ガルボスキャナーとステージモーションは、リンクおよびリンク解除できます。

標準のXY2-100、SL2-100、およびHSSIインターフェイスプロトコルを備えたサードパーティのGalvoscannerをサポートしています。 アプリケーションに適したGalvoscannerを選択するだけです。 ほとんどのサードパーティベンダーをサポートしているため、サーボモーターやドライブを交換する必要はありません。 モーションコントロールシステムを既存のドライブとGalvoscannerに接続するだけで、IFOVをすぐに実行できます。
堅牢で使いやすいモーションコントロールシステムを探している工作機械OEMの場合、 デモを設定するために私たちに連絡してください!
ポラリスモーションについて
Polaris Motionは、レーザーベースの製造におけるCNCマシン、光学面のダイヤモンド工具の切断と研削、およびその他の高性能分野における特殊なCNCマシン向けのモーションコントロールソリューションを専門としています。
トム・エリック
ポラリスモーション
www.pmdi.com
terlic@pmdi.com