
モーションコントロールサーバーソフトウェア
Polaris Serverは、PolarisUniverseOne™モーションコントローラー内にあるクアッドコアIntelCPU上のLinuxで実行される組み込みモーションコントロールソフトウェアアプリケーションです。 Polaris Serverは、一方のクライアントソフトウェアと通信し、もう一方のデバイスのMercury™ネットワークと通信します。
Polaris Serverの内部には、汎用モーションエンジン、Gコードエンジン、高速データ収集機能、およびその他の多くの機能があります。 高性能セットポイントジェネレータは、軸の制約を使用してマシンのスループットを最大化します。
線形、円形、スプライン補間およびマージ
多軸協調運動の場合、セットポイントジェネレータはプログラム命令に従って直線、円形、またはスプライン補間を実行します。 マージは、パスセグメント間の角度がゼロ以外の場合に適用される手法です。 Polarisセットポイントジェネレーターには、line-line、line-arc、およびarc-arcのパスペアをマージする機能があります。
最小時間設定値の生成
PolarisUniverseOne™セットポイントジェネレーターは、他に類を見ないものであり、マシン内の各モーターの最大定格を使用してツールパスを生成します。 コーナーに近づくと、マシンはできるだけ速く減速し、コーナーからストレートに出るときにできるだけ速く速度を上げます。 モーターの速度と加速の制限に違反することはありません。 パーツファイルは常に可能な限り最短の時間で完了します。
一定速度設定値の生成
ツールパスに沿って一定の速度を維持することは、溶接やディスペンスなどの多くのアプリケーションで重要です。 最速の一定速度は、最も遅い運動軸を特定し、パスのすべての部分に沿って一定速度が達成されるまでツールパス速度を調整することによって達成できます。 Polaris Motion Simulatorは、この手順を実行するのに役立ちます。
独立した軸の動き
多くのアプリケーションでは、モーション軸は独立して実行する必要があります。 機械のモーターは、異なる時間に始動および停止する必要があります。 この機能は、モーションコントロールインターフェイス(MCI)ライブラリAPIで使用できます。
調整された軸の動き
機械のすべてのモーターを同時に始動および停止する必要があるアプリケーションおよびプロセスでは、協調運動が必要です。 モーションは2Dまたは3D空間で指定できます。 このタイプのモーションは、ツールが線、円弧、またはスプラインを正確に追跡する必要がある3D溶接やディスペンスなどのアプリケーションで一般的です。 調整されたモーション移動は、MCIライブラリAPIとGコードを使用してサポートされます。
ハンドホイール制御
Polarisハンドホイール機能は、ハードウェア、ファームウェア、およびソフトウェアの組み合わせを使用して、オペレーターが手動パルスジェネレーターを使用して機械軸を制御できるようにします。 移動する軸を選択するために使用した機械式スイッチ。 典型的な用途には、機械のキャリブレーション、手動ジョギング、工具交換などがあります。
ガントリー軸のセットアップと制御
ガントリー軸には、同一のリニアサーボモーターとドライブのペアがあります。 サーボモーターは並列に配置され、機械的なブリッジで接続されています。 ドライブは同じ設定値を受け取り、目標はXNUMXつのサーボモーターが同じように動くことです。 これは、Polarisドライブで実行される多入力、多出力のサーボフィードバックレギュレーターで実現されます。 XNUMXつの軸は、Mercury™ネットワーク全体でリアルタイムのエンコーダ情報を相互に共有し、スキューエラーが排除され、ガントリーがXNUMXつのユニットとして移動します。 ガントリーは、機械的安定性のための広いスタンスを提供し、橋に沿って移動する移動荷重を補償できるため、便利です。
セットポイントジェネレータ
PolarisUniverseOne™セットポイントジェネレーターは、Gコード機能または代替プログラムからのパスポイントを受け入れます。 ポイント間の距離は大きくて不均一である可能性があり、間隔の狭いセットポイントでギャップを埋めるのはセットポイントジェネレータの仕事です。 セットポイントレートは1kHzでもかまいませんが、20kHz、100kHz以上でもかまいません。 料金は設定可能です。

Gコード言語とエンジン
>>詳細
Polaris Motionは、1996年から高度なCNC Gコード制御を提供しており、PolarisUniverseOne™モーションコントロールシステムの中心的存在です。 私たちの実装はEIA-RS274DGコード規格に準拠しており、3軸、5軸、および9軸のCNCマシンをサポートしています。 Polaris G-codeのコア機能は、正確で調整された多軸モーションコントロールを提供します。 これは業界をリードするテクノロジーであり、機械的およびレーザー光学的運動軸の両方を考慮しながら、比類のない幅と深さを備えています。
無限視野(IFOV)
>>詳細
レーザーガルボスキャナーは非常に高速ですが、視野が限られています。 一方、BLDCモーター駆動のXYZステージはストロークが長いですが、レーザーガルボスキャナーと比較すると低速です。 低速でロングストロークのXYZステージと高速でショートストロークのレーザーGalvoscannerを組み合わせることにより、Polaris MotionのIFOVテクノロジーを使用すると、両方の長所が得られます。
線形、円形、スプラインコマンドが発行され、ツールパスはステージモーションとレーザーモーションにシームレスに分離されます。
レーザー制御
>>詳細
レーザー制御は、切断、穴あけ、溶接、エッチング、彫刻、表面構造化などの多くの製造プロセスに必要です。 粉末床溶融(PBF)および有向金属蒸着(DMD)には、正確なレーザー制御が必要です。 レーザーは、金属のアニーリングや急冷などの材料変更プロセス、および半導体のインピーダンスの変更に使用されます。
これらのプロセスのそれぞれについて、レーザーエネルギーの供給を制御するための好ましい技術があります。 レーザーのXNUMXつの広いクラスは、連続波(CW)とパルスです。 CWレーザーは通常、低コストであり、平均出力が高いという利点があります。 パルスレーザーの平均出力は低くなりますが、短いパルス光子エネルギーは、燃焼する代わりに材料の化学結合を切断します。 熱影響部(HAZ)が最小限に抑えられ、カットがきれいになり、バリ取りなどの追加材料の後処理が不要になることがよくあります。
PolarisUniverseOne™モーションコントロールシステムは、高度なハードウェアとファームウェアを使用して、パルスレーザーとCWレーザーの両方に対応する幅広いレーザー光源制御技術をお客様に提供します。 レーザーがツールパスを通過するときに、パワーがリアルタイムで正確に制御されます。 過燃焼は過去のものとなり、最高品質の加工結果が得られます。
PolarisUniverseOne™ドライブ、SL2-100インターフェース、およびその他のモジュールには、さまざまなレーザー光源メーカーと簡単に統合できるレーザー制御インターフェース(LCI)が装備されています。
機械校正
>>リソース その他
多くのハイエンド工作機械アプリケーションには、高度な精度が必要です。 一部の機器ではミクロンの精度が必要であり、その他の機器ではXNUMX桁のナノメートルの精度が必要です。
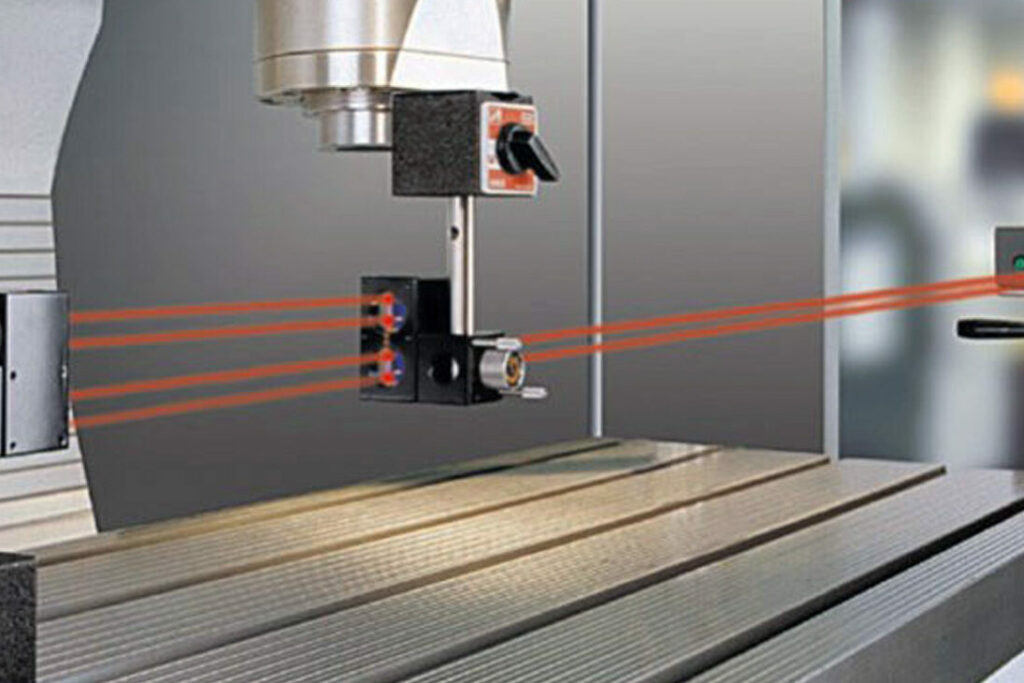
PolarisUniverseOne™モーションコントロールシステムには、これらの結果を達成するのに役立つツールが装備されています。 メカニカルステージキャリブレーションと光学レンズキャリブレーションの両方のテクニックが含まれています。 どちらの場合も、メカニカルステージの場合はレーザー干渉計などの正確な外部基準を用意するか、レーザーガルボスキャナー用の正確なガラスキャリブレーションプレートを用意することが重要です。
メカニカルステージキャリブレーション
>>詳細
PolarisUniverseOne™は、ステージキャリブレーション用に、バックラッシュ、エンコーダー、およびアッベエラー補正用のモーションコントロールソフトウェアを提供します。 実験が行われ、レーザー干渉計またはトラッカーからの測定値が、対応するエンコーダー値とともに入力されます。 PolarisUniverseOne™アルゴリズムは、正確な工作機械操作のためにリアルタイムで実行されるキャリブレーションテーブルを提供します。
光学ガルボスキャナーキャリブレーション
>>詳細
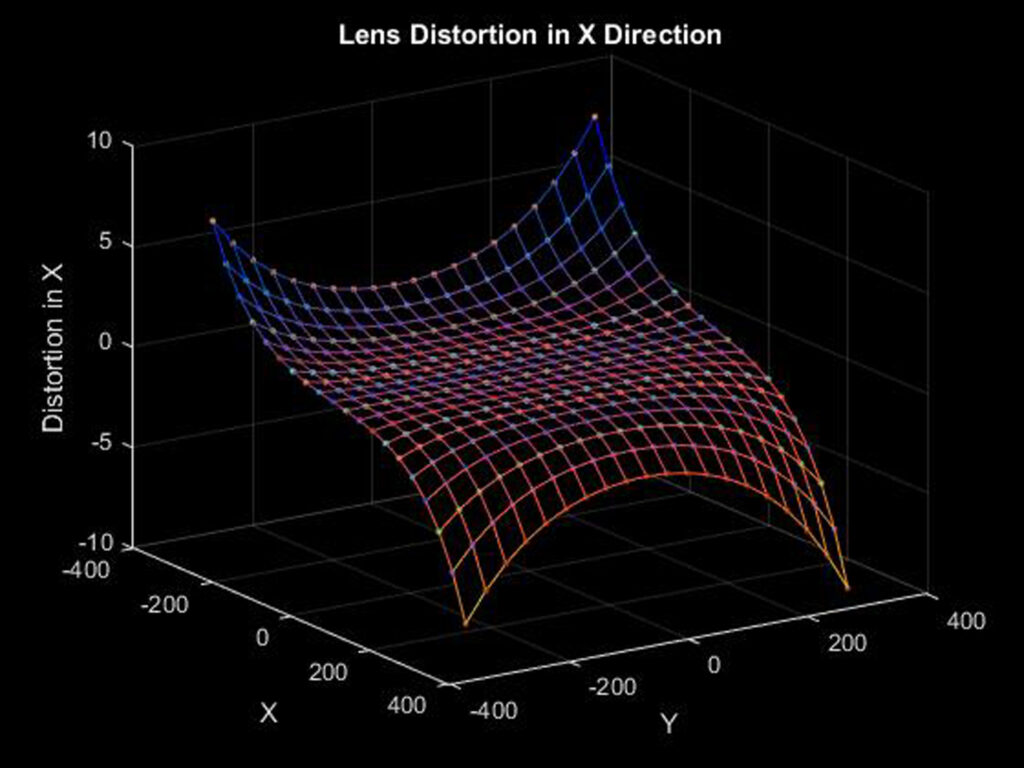
PolarisUniverseOne™システムは、3つのキャリブレーションツールを提供しますrd パーティーXY2-100、SL2-100、HSSI Galvoscanners、およびネイティブPolarisGalvoscanners用。 基準のグリッドはレーザーGalvoscannerで作成され、これらはマシンビジョンシステムから取得された結果と比較されます。 高度なカーブフィッティングアルゴリズムを実行して、正確なリアルタイム結果を生成する高精度のキャリブレーショングリッドを作成します。 この手法は、2Dおよび3Dガルボススキャナーの両方に適用されます。
工作機械とロボットの形状
>>詳細
ロボット工学は、PolarisUniverseOne™モーションコントロールソフトウェアシステムによって、独自の斬新な方法でサポートされています。 ロボットは、シリアル、パラレル、またはハイブリッドのマニピュレーターにすることができます。 デカルト座標系で記述されたロボットのポーズとロボットの関節の間の数学的マッピングは、順方向および逆方向の運動学です。
PolarisUniverseOne™コントローラーは、順運動学、逆運動学、および拘束を幾何学モデルまたは世界モデルにカプセル化します。 このカプセル化により、デカルト空間で発生するモーションの記述を可能にする抽象化が作成されます。
このマッピングを実行することにより、ロボット工学、経路計画、およびセットポイント生成の間に分離が作成されます。 標準の5軸CAMパッケージと5軸Gコードを含むすべての標準ツールを使用できます。
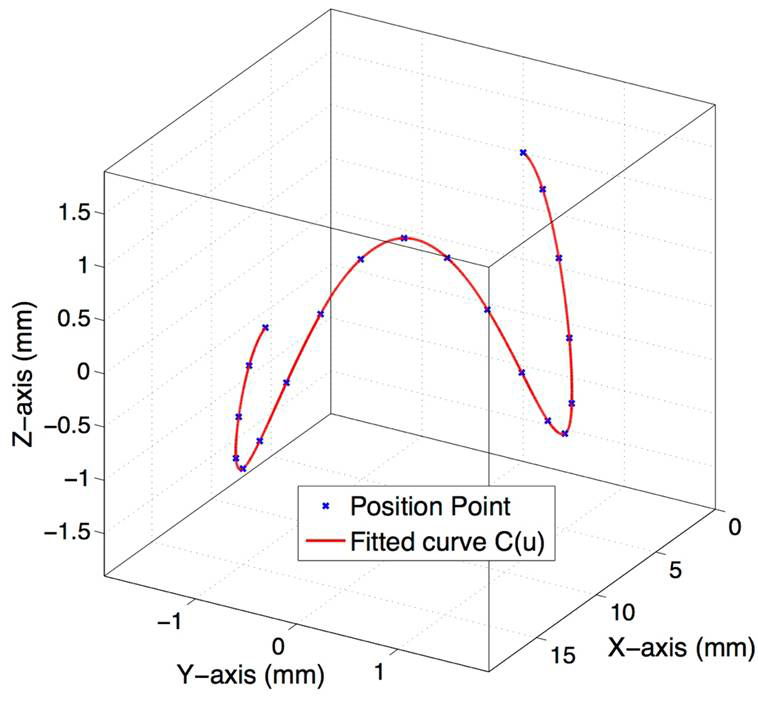
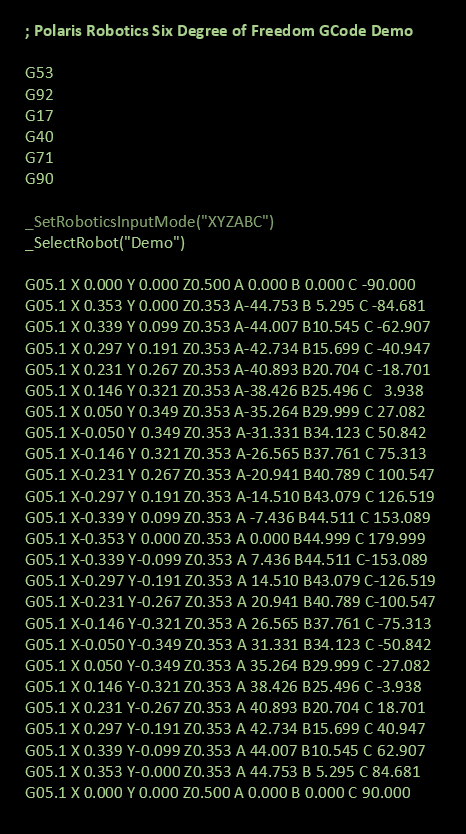
5軸CNC工作機械、シリアル産業用ロボット、正確な6DOFヘキサポッドなど、すべてのマシンタイプをこの方法でサポートできます。
モーションコントロールシステムシミュレータ
>>詳細
PolarisUniverseOne™シミュレータは、PolarisMotionハードウェアを必要とせずにツールパスの生成を正確にシミュレートするモーションコントロールソフトウェアプログラムです。 シミュレータは、入力としてGコードファイルを受け入れ、分析可能な位置設定値を生成します。