Polaris Motion’s infinite field of view (IFOV) algorithm seamlessly coordinates the motion of a laser Galvoscanner and a motorized stage. It is easy to set up, as there is only one parameter to select. A slider allows the user to choose how much effort is executed by the scanner and how much is executed by the stage.
Polaris’ IFOV can be applied to many motion axes. The simplest application uses a XY stage and a 2D Galvoscanner.
Unique to our Company, Polaris IFOV can be used to coordinate a 5-Axis XYZ-AC stage and a 3D Galvo scanner. The motion of a 5-Axis CNC machine or robot is coordinated with a 3D Galvo scanner without effort.
2-Axis Applications
In 2D applications, some IFOV benefits include a larger effective working field, ability to process larger parts, improved part quality with zero stitching error, a single coordinate system, and improved throughput.
3-Axis Applications
In 3D applications, IFOV on the Z axis eliminates the need to make comprised decisions with respect to the optical beam path. The laser spot size can be kept constant over large working volumes. While combining XY and Z IFOV, the laser optic beam delivery doesn’t have to be compromised in any way.
A unique feature of Polaris Motion’s IFOV technique is full compatibility with 5-Axis CNC machine tool applications and 6-Axis articulated robot arm applications.
Eliminate Stage Tracking Error
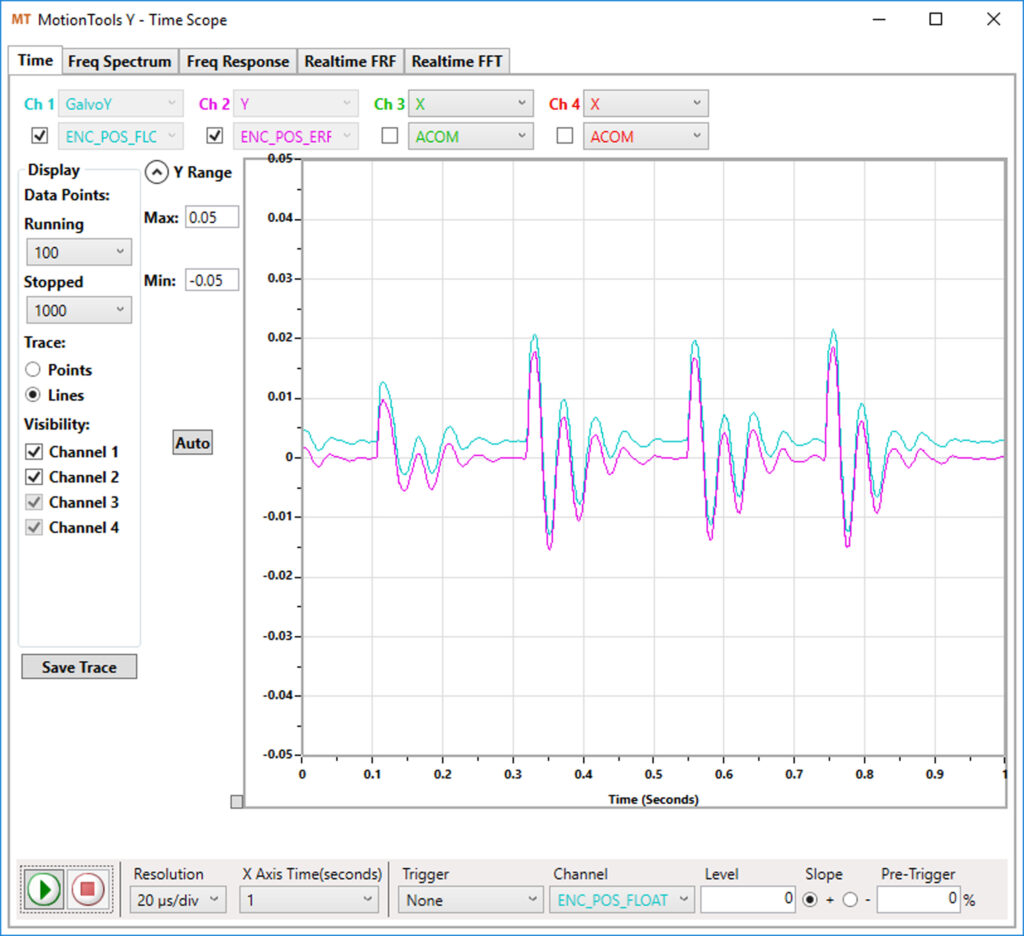
A highly responsive Galvo scanner can be used to virtually eliminate the servo tracking error experienced by a high inertia stage. By using the high-speed Mercury network the X and Y stage servo errors are communicated to the Galvo scanner axes, and are subtracted from the Galvo axes’ setpoints, thus implementing dynamic stage servo error compensation.
3D Galvoscanners
A 3D Galvo scanner can be integrated with a 5-Axis CNC machine tool make complex; rotational 3D laser processed parts. Polaris Motion’s 5-Axis IFOV takes into consideration the additional revolute axes. The coordination of mechanical and laser-optic axes into the XYZ Cartesian directions is transparent to the user, and ease of use is perfectly preserved.
The approach taken is general, and is similarly applied to 6-Axis articulated robot arms. A 3D scan head can be attached to a robot end effector for use in remote welding applications, with the work piece fixtured below.
Alternately, a work piece can be held by the robot grip and a 3D galvo scanner can be located on an overhead fixture for surface structuring.
Advantages of Polaris Motion Infinite Field of View
- A single parameter for setup
- One coordinate system
- One large continuous working field
- Zero stitching error
- Higher part quality
- Manufacture large parts seamlessly
- 2D and 3D IFOV
- Constant laser spot diameter with 3D IFOV
- Incident angles closer to 90deg
- IFOV for 5-Axis CNC machines
- IFOV for 6-Axis articulated robot arms
- Dynamic stage error correction using faster Galvo scanner axes
- Supports laser control along 2D and 3D paths
- Works with Polaris 2D and 3D Galvo scanners
- Works with XY21-100, SL2-100 and HSSI Galvo scanner