Mercury™ High-Speed Real-Time Motion Control Network
Mercury™ is Polaris Motion’s patented, ultra high-speed motion control network. It’s used to connect a Polaris UniverseOne™ controller with drives, I/O and other devices. A controller has 4 ports, each one supporting a daisy chain of up to 31 devices for a maximum 124 devices on a Mercury™ network.
US Patent 8,363,680
European Patent 2494742 B1
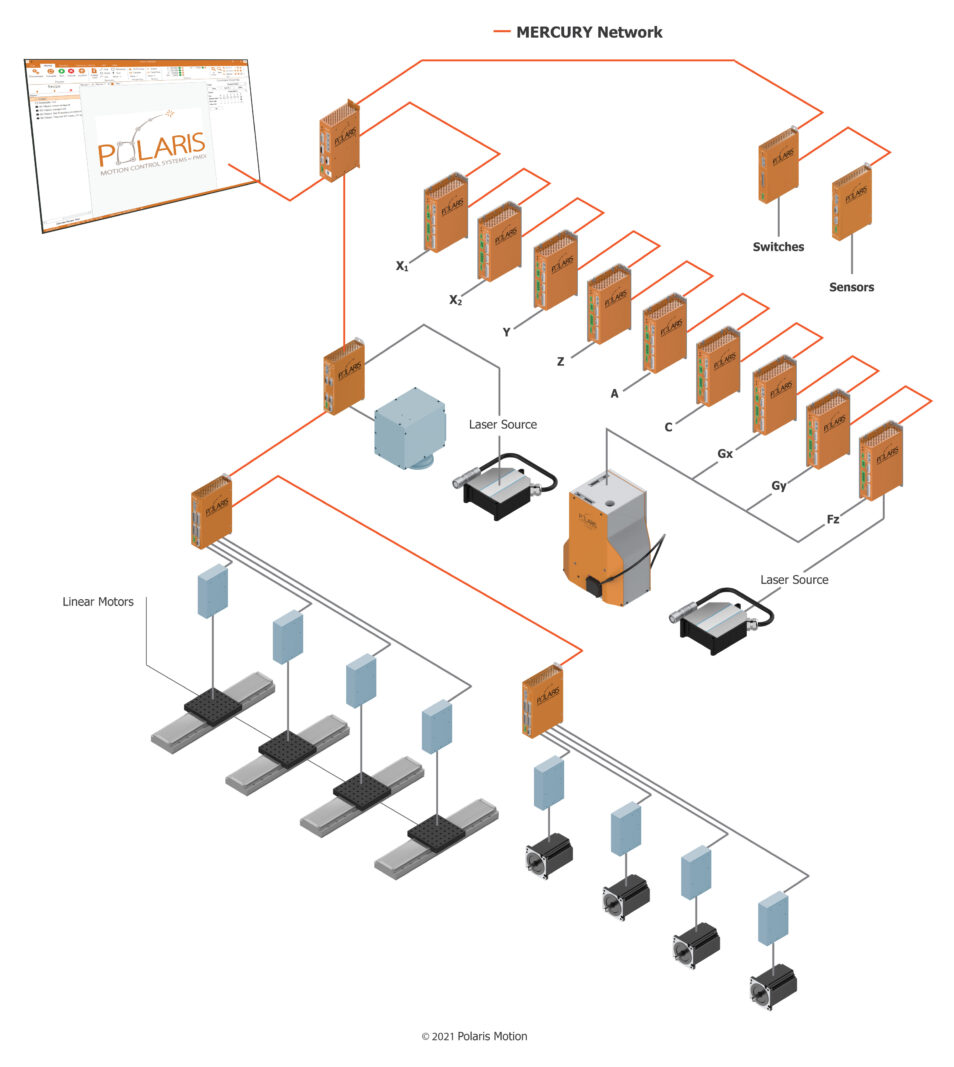
A Mercury™ Network
has four protocols:
1. Synchronous protocol
2. Asynchronous protocol
3. Streaming protocol
4. Time protocol
Mercury™ Network Communication Protocol
1.Using the synchronous protocol, position setpoints are sent from the controller to each of the remote drives on the tick of the SYNC signal. Simultaneously, data is collected from the drives at the same rate, same SYNC signal and sent back to the controller for storage or analysis. Using the SYNC signal, setpoint rates from 1kHz through 200kHz may be achieved for multi-axis machine configurations.
2.The asynchronous protocol uses software running on the controller to request information such as the current position, drive temperature and other machine variables from drive registers.
3.The streaming protocol is used to program the drives, digital I/O, analog I/O and the other Mercury™ network devices with new firmware.
4.The time protocol is a sophisticated technology that ensures that each device on the Mercury™ network is synchronized with one another to within nanoseconds.
Devices Supported
There is a comprehensive list of devices that are available for the Mercury™ motion control network. These include:
- Polaris UniverseOne™ Motion Controller
- Single and Three Phase PWM Drives
- Single and Three Phase Linear Drives
- Galvanometer Drives
- Digital I/O
- Analog I/O
- Servo Interface Modules for 3rd Party Servo Motor Systems
- Step Direction Interface Modules for 3rd Party Stepper Motor Systems
- XY2-100 Galvo scanner Modules
- SL2-100 Galvo scanner Modules
- HSSI Galvo scanner Modules
- Polaris 2D and 3D Galvo scanners
- Specialized Devices for OEM Customers
Performance
Polaris Motion’s patented Mercury™ motion control network has been optimized for high performance motion control applications. It has been designed to support the most demanding machine architectures. The protocol can support communication from a single motion controller to multiple CNC machines or robots. It can be used to control an array of 3D scan heads for metal AM applications. Some Mercury™ network capabilities include:
- 4 real-time ports at 1 Gbps per port
- Bi-directional data transmission
- 125 devices including the controller
- Synchronous data communication
- Asynchronous data communication
- Streaming protocol for programming
- Time protocol for synchronization