Polaris is everything you would ever want: incredibly fast, real-time control designed right. PMDi has removed the anxiety that commonly surrounds projects that need precisely timed and coordinated operations between motors, I/O, and control algorithms. In addition, they delight you by offering a modern, programmer friendly development environment with a rich set of API’s that are continually growing. To top it all off, they offer a customer service experience that never fails to make you feel like you are working with a close friend or co-worker.
Nicholas Eastvold, Software Engineering Manager
Ametek Precitech
Powerful, Easy-to-Use Motion Control Application Development Platform
Creating an easy-to-use motion control application development environment, while preserving advanced capabilities has been a goal of Polaris Motion. A number of systems and tools are part of the development package that makes this possible.
Creating Embedded Applications
The Polaris UniverseOne™ motion controller is a powerful computing platform. It uses a quad-core Intel CPU processor as its hardware compute engine, and it uses standard Debian Linux as the operating system. Real-time processes such as the motion network are managed using custom FPGA hardware.
Communication with client HMI software is performed across regular Ethernet, and communication to the drive actuators is accomplished over Polaris Motion’s patented, real-time, Gbps motion control network, Mercury™.
The Qt creator environment is used for embedded software development. OEM customers can write their embedded code using C++, along with the Polaris Motion communication library suite for access to hundreds of functions. The Polaris Communication Library is comprised of four main components: motion control interface library (MCI API), G-code interface library (GCI API), Polaris server utility library (PSU API, and high-speed data acquisition library (HSDAQ API). >> Learn More
An embedded application can be developed, compiled and liked to Polaris Server. As an alternative, inter-process communication can be used. An OEM customer can write independent executables which communicate with the stock Polaris Server binary.
Creating an HMI with .NET C# & MFC C++
An OEM customer can develop their own machine tool HMI using the Microsoft Visual Studio development environment. Communication to Polaris Server and any custom executables, which run inside the Polaris UniverseOne™ motion controller is accomplished with the Polaris Communication DLL.
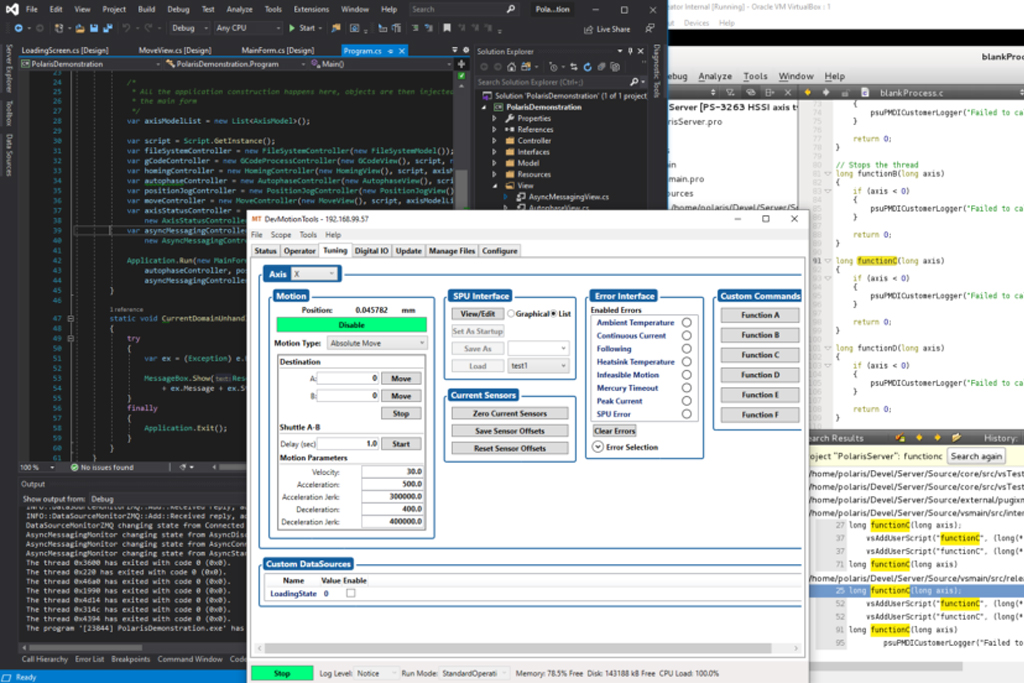
Polaris Motion Simulator: MotionSIM2
Polaris MotionSIM2 software can be used to simulate a Polaris UniverseOne™ motion control system. Polaris MotionSIM2 uses Oracle VirtualBox software to emulate a real Polaris motion controller. In the virtual machine it is possible to set up and configure a virtual CNC machine or virtual robot having multiple axes. An embedded process can be developed and client HMI can be developed to communicate with the simulated machine.
Because real hardware is not needed, multiple software developers can work on the same project to expedite time to market. Various machine tool options, including actuator selection, can be tested in software before any expensive components are purchased. During commercialization, sales engineers can use the simulator to demonstrate to prospects, and even before a machine is delivered, customer operators can be trained to use the machine.