MotionTools™ Setup & Tuning Software
MotionTools is a Polaris Motion software client that is used to configure, setup, tune and operate a Polaris UniverseOne™ motion control system.
A typical Polaris motion control system has a controller, a number of servo motor drives, a digital I/O module and peripherals which communicate to one another over Mercury™ high speed motion control network.
MotionTools™ is organized into tabs and menus. The main tab items are as follows
- Observing status of devices on the Mercury™ network
- Operating the machine being controlled by the Polaris motion control system
- Tuning servo motors
- Observing the status of digital I/O
- Updating firmware for devices located on the Mercury network
- Transferring files between the client PC and Polaris UniverseOne™ motion controller
- Configuring devices located on the Mercury™ network
Observing Status
Observing the status of a Polaris motion control system can be very useful. In the status tab, many things can be observed, including: a scan of all of the drives and I/O modules on the Mercury™ network, hardware and firmware versions, servo rates, laser trigger modes, and many other hardware and firmware details.
Operating the Polaris Motion System
MotionTools provides tools for operating a configured system. Motion axes can be enabled and disabled, three-phase motors can be commutated manually and automatically. An axis can be homed, and jogged. G-code files can be loaded and executed. Other functions include implementing infinite field of view (IFOV), encoder compensation and lens compensation.
Tuning a Polaris Motion System
Servo motor tuning is an important function of MotionTools. In the tuning tab, different PID servo tuning files may created, saved and applied. An axis can be shuttled back and forth and kinematic parameters such as acceleration and jerk can be applied. Many different motion functions can be used for tuning, including impulse, step, random, swept sine, sum of sines and more.
Customers may choose from among many different feedback control structures. PIDVAFF is standard, and automatic frequency control and iterative learning control are supported. Feedback filters are available for gantry axis control. In addition to these, digital filters may be applied as cascaded bi-quads or state-space control structures.
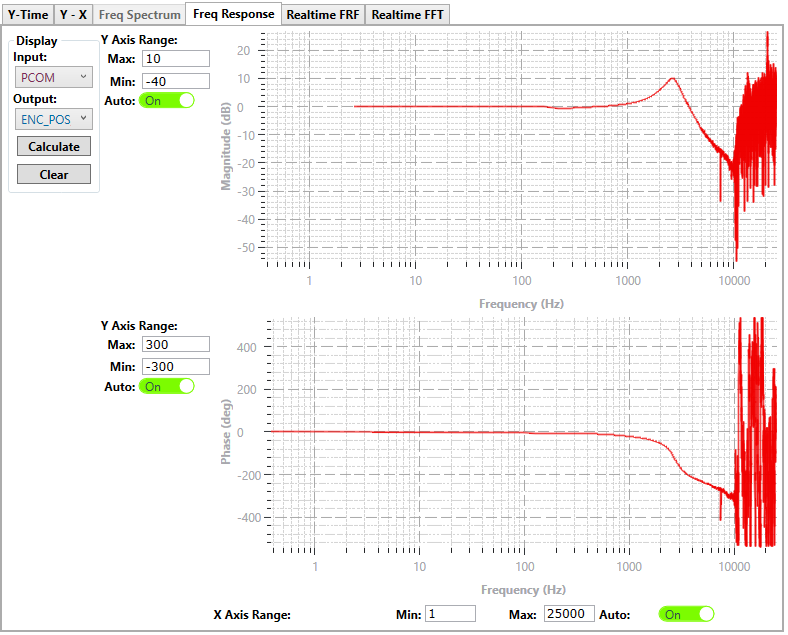
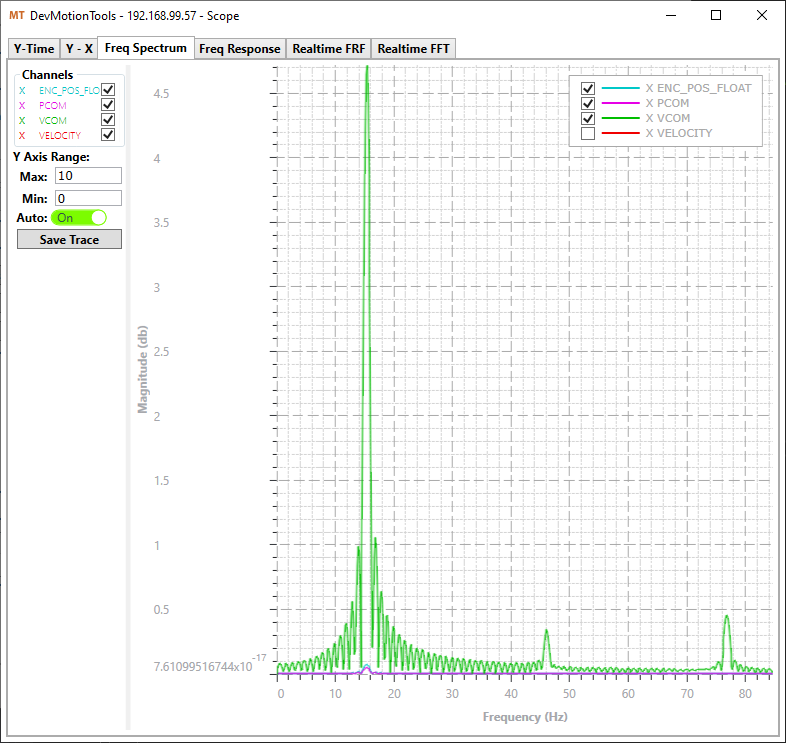
Digital Oscilloscope
The digital oscilloscope is a highly responsive, feature rich graphical tool that can be used in conjunction with the tuning tab to optimize motor performance. A large variety of plot types are available, including: Y-T, Y-X, frequency spectrum, frequency response, real-time FRF, and real-time FFT. Any variable that can be collected can be plotted and analyzed, including actual position, velocity, acceleration, current and Voltage.
For ease-of use, the oscilloscope has auto-ranging, triggering, zooming, panning, cursors and measurements. There is also scope capture for saving to file.
System Configuration and Device Setup
Other notable features that assist in making the Polaris easier to use include: digital I/O display and control, axes parameter settings, firmware file management, IFOV configuration, Hall table generation, lens calibration and more.