Polaris CAD/CAM
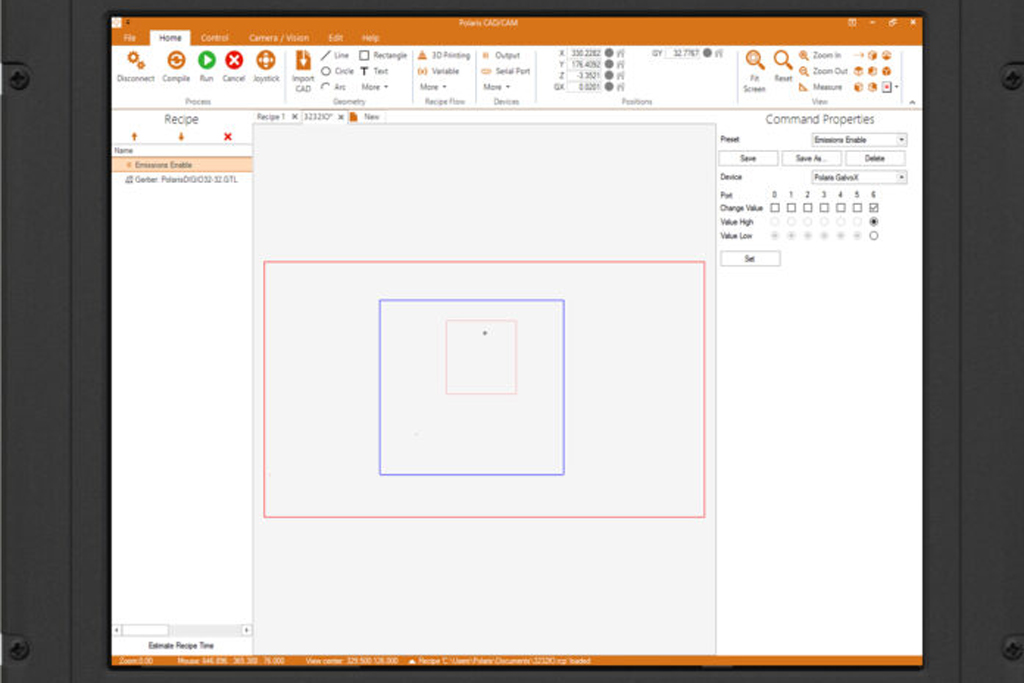
Polaris CAD/CAM is machine control, computer aided design and computer aided manufacturing software for 2D, 2.5D and 3D laser CNC machines.
>>Learn More
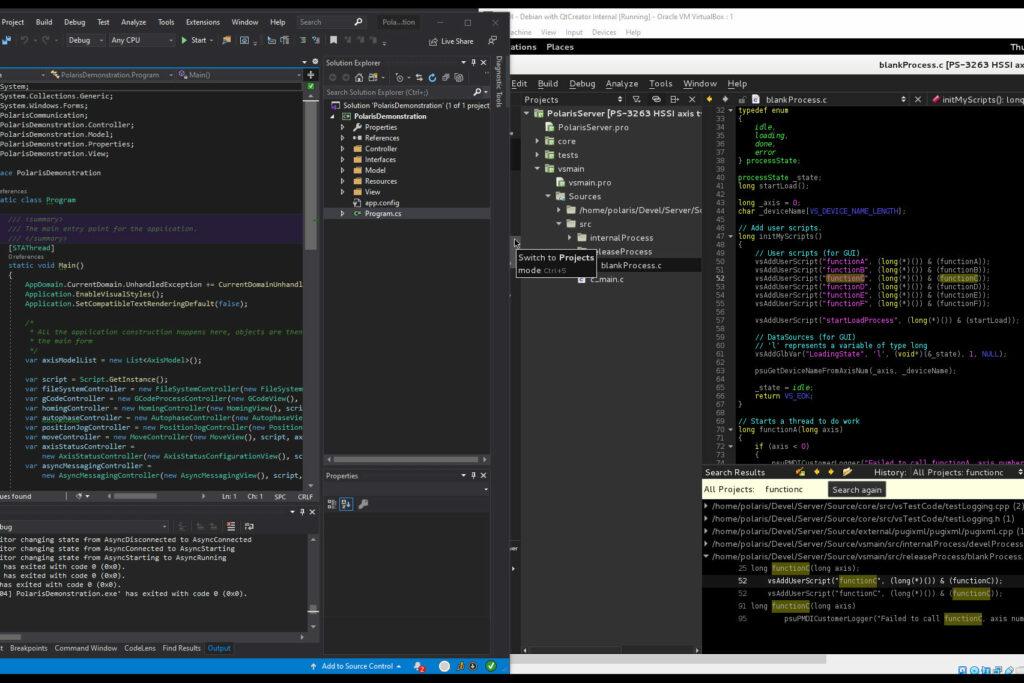
Polaris Motion Suite
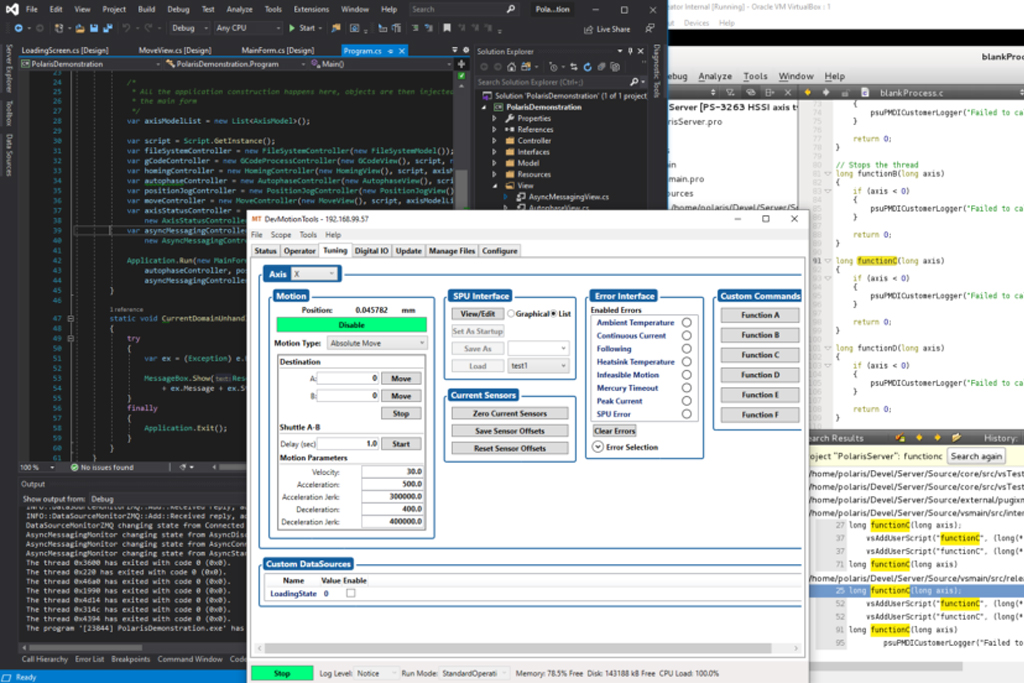
Polaris MotionSuite is a collection of software applications, executables, libraries, and tools that are used by customers to develop their own machine control software application.
>>Learn More
Polaris Motion Simulator
Polaris MotionSIM2 is a computer software program that simulates the generation of exact tool paths without the need for Polaris Motion hardware.
>>Learn More
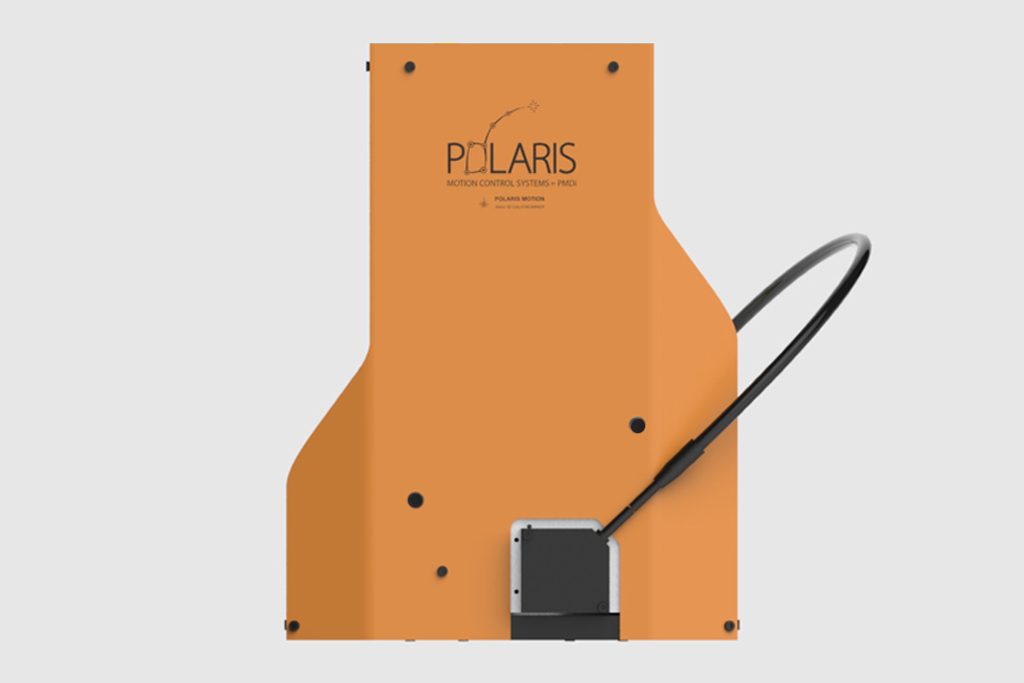
Polaris UniverseOne™ Motion Controller

The Polaris UniverseOne Motion Controller is an Intel/Linux computer that runs the embedded motion control software.
>>Learn More
• Quad core Intel Atom CPU @ 1.91GHz
• 4GB DDR3L RAM 1333 MHz
• 8GB SSD (expandable)
• 4 Mercury communication ports
• Standard ethernet connection 100/1000 Mbps
• 2 Opto-isolated digital outputs (24Vdc)
• 2 Opto-isolated digital inputs (up to 24Vdc)
• Separate Watchdog
• Handwheel connector
170VDC Three Phase PWM Drive

The Polaris Three Phase PWM 170VDC Drive supports motor voltage outputs of up to 170VDC, 15A Continuous/30A Peak Current Amplitude with a wide variety of encoder inputs, analog IO and triggering options.
>>Learn More
• PWM frequencies 20, 40, 80KHz
• Nominal 170VDC, 180VDC Max
• 13.5Apk continuous (15Apk continuous w/Additional Heatsinking)
• 30Apk peak
• 2 Mercury communication ports
• Hall sensor
• Digital quadrature encoder (up to 60MHz)
• SinCos encoder (up to 1MHz)
• Resolute encoders with BiSS
• EnDat 2.1/2.2 encoders
• Absolute current encoders
• Tamagawa encoder
• Plus additional options available
• 2 Opto-isolated digital outputs (24VDC)
• 6 Opto-isolated digital inputs (up to 24VDC)
• 2 TTL high speed digital outputs
• 2 TTL high speed digital inputs
• 1 16-bit analog input, 0-10V Single-Ended or +/-10V Differential
• 1 16-bit analog output, 0-10V or +/-10V Single-Ended
340VDC Three Phase PWM Drive

The Polaris Three Phase PWM 340VDC Drive supports motor voltage outputs of up to 340VDC, 15A Continuous/30A Peak Current Amplitude with a wide variety of encoder inputs, analog IO and triggering options.
>>Learn More
• PWM frequencies 20, 40, 80KHz
• Nominal 340VDC, 380VDC Max
• 6Apk continuous (15Apk continuous w/Additional Heatsinking)
• 30Apk peak
• 2 Mercury communication ports
• Hall sensor
• Digital quadrature encoder (up to 60MHz)
• SinCos encoder (up to 1MHz)
• Resolute encoders with BiSS
• EnDat 2.1/2.2 encoders
• Absolute current encoders
• Tamagawa encoder
• Plus additional options available
• 2 Opto-isolated digital outputs (24VDC)
• 6 Opto-isolated digital inputs (up to 24VDC)
• 2 TTL high speed digital outputs
• 2 TTL high speed digital inputs
• 1 16-bit analog input, 0-10V Single-Ended or +/-10V Differential
• 1 16-bit analog output, 0-10V or +/-10V Single-Ended
Single Phase Linear Drive

The Polaris Single Phase Linear Drive supports motor voltage outputs of up to +/- 48VDC and includes SOA current protection with a wide variety of encoder inputs, analog IO and triggering options.
>>Learn More
• +/- 24VDC, +/- 36VDC or +/- 48VDC
• 10A continuous (see SOA curve)
• 10A peak
• 2 Mercury communication ports
• Digital quadrature encoder (up to 60MHz)
• SinCos encoder (up to 1MHz)
• Resolute encoders with BiSS
• EnDat 2.1/2.2 encoders
• Absolute current encoders
• Tamagawa encoder
• Plus additional options available
• 2 Opto-isolated digital outputs (24VDC)
• 6 Opto-isolated digital inputs (up to 24VDC)
• 2 TTL high speed digital outputs
• 2 TTL high speed digital inputs
• 1 16-bit analog input, 0-10V Single-Ended or +/-10V Differential
• 1 16-bit analog output, 0-10V or +/-10V Single-Ended
Three Phase Linear Drive

The Polaris Three Phase Linear Drive supports motor Voltage outputs of up to +/- 75VDC and includes SOA current protection with a wide variety of encoder inputs, analog IO and triggering options.
>>Learn More
• +/- 24VDC, +/- 36VDC, +/- 48VDC, or +/-75VDC
• 14A continuous (see SOA curve)
• 20A peak
• 2 Mercury communication ports
• Digital quadrature encoder (up to 60MHz)
• SinCos encoder (up to 1MHz)
• Resolute encoders with BiSS
• EnDat 2.1/2.2 encoders
• Absolute current encoders
• Tamagawa encoder
• Plus additional options available
• 2 Opto-isolated digital outputs (24VDC)
• 6 Opto-isolated digital inputs (up to 24VDC)
• 2 TTL high speed digital outputs
• 2 TTL high speed digital inputs
• 1 16-bit analog input, 0-10V Single-Ended or +/-10V Differential
• 1 16-bit analog output, 0-10V or +/-10V Single-Ended
Digital I/O Module

The Polaris Digital IO Module has 32 digital inputs and 32 digital outputs of 24V optically isolated logic.
>>Learn More
• 32 Opto-isolated digital inputs (24VDC)
• 32 Opto-isolated digital outputs (24VDC)
• 2 Mercury communication ports
Analog I/O Module

The Polaris Analog IO Module has four 16-bit analog inputs and four 16-bit analog outputs.
>>Learn More
• 4 analog inputs, +/-10V differential, +/-5V differential or 0-10V single-ended
• 4 analog outputs, +/-10V single-ended, +/-5V single-ended or 0-10V single-ended
• 2 Mercury communication ports
4 Channel Servo Module

The Polaris 4 Channel Servo Interface Module has a customizable control structure and performs full 64-bit double precision calculations providing high resolution and dynamic range.
>>Learn More
• Differential +/-10V analog
• 20KHz analog bandwidth
• 2 Mercury communication ports
• 4 Opto-isolated digital outputs per channel (24VDC)
• 6 Opto-isolated digital inputs per channel (up to 24VDC)
• 2 TTL high speed digital outputs
• 1 TTL high speed digital input
• 1 16-bit analog input, 0-10V Single-Ended or +/-10V Differential
4 Channel Pulse Module
The Polaris 4 Channel Stepper Interface Module features 4 independent pulse/direction axes with a maximum pulse generation frequency of 4MPPS.
>>Learn More
• Up to 4MPPS pulse rate
• 50ns <-> 31.925us pulse output width
• Pulse/Direction or CW/CCW mode
• Differential or Open Collector
Position Feedback:
• 64-Bit Digital quadrature encoder (up to 60MHz)
• Differential or single-ended
• 2 Mercury communication ports
• 1 Opto-isolated digital safety input (up to 24VDC)
• 2 TTL high speed digital outputs (Optional Isolation)
• 1 TTL high speed digital input (Optional Isolation)
Axis IO
• 1 Opto-isolated digital output (24VDC)
• 5 Opto-isolated digital inputs (up to 24VDC)
• 2 analog inputs (Optional)
• 2 analog outputs (Optional)
XY2-100 Galvoscanner Module

The Polaris XY2-100 Module is a Mercury network device that has one or two DB25 connectors. Each connector supports XY scanner motors and a Z focus motor. The XY2-100, and XY2-100-E protocols are both supported. At the bottom right there is a connector for laser source control. Position setpoints are received from the Polaris UniverseOne™ controller via the Mercury communication ports at the top.
• 2 XY2-100 Interfaces (3 Axes on each interface, second interface optional)
• 2 Mercury communication ports
• 2 Opto-isolated digital inputs (up to 24VDC)
• 1 Opto-isolated digital output (24VDC)
• 4 TTL high speed digital outputs
• 2 TTL high speed digital inputs
• 2 16-bit analog outputs, 0-10V or 0-2.5V Single-Ended
SL2-100 Galvoscanner Module

The Polaris SL2-100 Module is a Mercury network device that has has two sets of Galvoscanner connectors. Each row supports two scanner motors and one focus motor. At the bottom right there is a connector for laser source control. Position setpoints are received from the Polaris UniverseOne™ controller via the Mercury communication ports at the top.
>>Learn More
• 2 SL2-100 Interfaces (3 Axes on each interface, second interface optional)
• 2 Mercury communication ports
• 2 Opto-isolated digital inputs (up to 24VDC)
• 1 Opto-isolated digital output (24VDC)
• 4 TTL high speed digital outputs
• 2 TTL high speed digital inputs
• 2 16-bit analog outputs, 0-10V or 0-2.5V Single-Ended
HSSI Galvoscanner Module
The Polaris HSSI Module is a Mercury network device that has has two sets of Galvoscanner connectors. Each row supports two scanner motors and one focus motor. At the bottom right there is a connector for laser source control. Position setpoints are received from the Polaris UniverseOne™ controller via the Mercury communication ports at the top.
>>Learn More
• 4 HSSI Interfaces (second set of interfaces optional)
• 2 Mercury communication ports
• 2 Opto-isolated digital inputs (up to 24VDC)
• 1 Opto-isolated digital output (24VDC)
• 4 TTL high speed digital outputs
• 2 TTL high speed digital inputs
• 2 16-bit analog outputs, 0-10V or 0-2.5V Single-Ended
PS-120 Power Supply

The PS-120 is a power supply that has been designed for servo motor drive systems. It receives 120VAC line power and converts that to 170VDC for servo motor drives. It supports shunting.
>>Learn More
PS-240 Power Supply

The PS-240 is a power supply that has been designed for servo motor drive systems. It receives 240VAC line power and converts that to 340VDC for servo motor drives. It supports shunting.
>>Learn More
• Single Phase or Three Phase AC
• 220VAC Nominal, 240VAC Max
• Inrush current limiter
• Connects directly to mains
• Filtered DC output voltage
• 310VDC Nominal, 340VDC Max
• 25A continuous current
• 50A peak current
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Aenean diam dolor, accumsan sed rutrum.
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Aenean diam dolor, accumsan sed rutrum.
• Single Phase or Three Phase AC
• 110VAC Nominal, 120VAC Max
• Inrush current limiter
• Connects directly to mains
• Filtered DC output voltage
• 155VDC Nominal, 170VDC Max
• 25A continuous current
• 50A peak current
2D Galvoscanner

Polaris offers a high-speed 2D digital Gavoscanner. It has a 10mm aperture and supports 10.6µm and 355/532/1064nm laser wavelength.
>>Learn More
3D Galvoscanner
Polaris offers a high-speed 3D digital Gavoscanner. It has a 30mm aperture and supports 10.6µm and 355/532/1064nm laser wavelength.